Dioda je součástka, která propouští proud pouze v jednom směru. Její voltampérová charakteristika je značně nesymetrická. V propustném směru je přikloněna k ose proudu, což znamená, že dioda má malý odpor. Charakteristika je navíc posunuta o tzv. napětí potenciálové přehrady. Toto prahové napětí Up, které vzniká jako důsledek difuze volných nosičů náboje v oblasti přechodu, je nutné překonat, aby vůbec došlo k otevření diody. Velikost napětí se liší podle materiálu a pro nejpoužívanější křemík je asi 0,6 V. S rostoucí teplotou toto napětí klesá téměř lineárně se strmostí 2mV/K. V závěrném směru je charakteristika diody prakticky totožná s osou napětí. Z toho vyplývá, že zbytkový proud diodou v závěrném směru lze většinou zanedbat. S rostoucí teplotou závěrný proud Ir narůstá.
obr. 41 - Charakteristika polovodičové diody
Reálnou diodu lze napěťově namáhat v závěrném směru jen do určitého napětí Ubr, protože pak nastane destruktivní průraz. Podobná omezení platí samozřejmě i rpo maximální proud Imax v propustném směru. Orientačně lze odhadnout dovolené namáhání z hyperboly konstantního výkonu: I = PMAX/U. Oblast přechodu bez volných nosičů náboje se chová jako dielektrikum kondenzátoru, jehož kapacita je nepřímo úměrná závěrnému napětí. S výjimkou speciálních kapacitních diod - varikapů je kapacita přechodu jev nežádoucí, protože zhoršuje dynamické vlastnosti diody.
Nejhorší situace nastává při rychlém přechodu z vodivého do nevodivého stavu (komutaci diody). Nosiče náboje nezanikají dostatečně rychle a po dobu zpětného zotavování trr protéká diodou proud i při závěrné polarizaci. Průběh proudu přibližně odpovídá derivační špičce proudu při nabíjení kapacity. Průběh se v místě maximálního proudu vyznačuje ostrým zlomem s následujícím rychlým poklesem. Protože usměrňovací dioda je téměř vždy zapojena do obvodu s indukčností (transformátorem), dochází k indukování velmi velkých rušivých špiček napětí
| ui = L di/dt |
(88) |

obr. 42 - Dynamický režim diody
Toto napětí se přičítá k závěrnému, protože podle indukčního zákona se cívka snaží zabránit zániku elektromagnetického pole, a tedy i udržet stávající proud v obvodu.
Kromě nežádoucího zvýšení závěrného napětí, které ohrožuje polovodičový prvek průrazem, který způsobují indukované špičky napětí vysokofrekvenční rušení. Tyto špičky vzhledem k strmosti hran nelze odfiltrovat elektrolytickým kondenzátorem, a proto je vhodné přemostit diody zdrojů keramickými kondenzátory, anebo aspoň připojit malý keramický kondenzátor paralelně k elektrolytickému.
Pro spínané zdroje, které pracují na vyšších kmitočtech, je nutné používat speciální rychlé diody. U diod pro všeobecné použití, které mají menší plochu přechodu a pracují s podstatně menšími proudy, se tyto problémy vyskytují až při mnohem vyšších kmitočtech. Existují i speciální vysokofrekvenční diody, schopné zpracovávat signál s kmitočtem několika gigahertzů. S rostoucím kmitočtem se u všech diod zkracuje relativně periody signálu vzhledem k zotavovací době diody, a dioda přestává usměrňovat.
| Schematické značky diod:
obr. 47 - Kapacitní dioda (varikap)
|
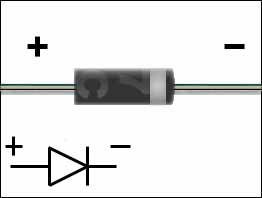
Skutečný vzhled diod:
obr. 48 - Označení na reálné diodě
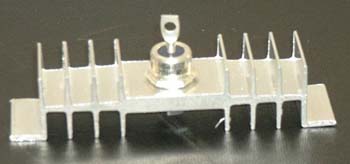
obr. 49 - Výkonová dioda s chladičem |
Diody rozdělujeme podle způsobu aplikace na :
Kapacitní diody (varikap)
Usměrňovací diody
Stabilizační diody
Světlo emitující diody (LED)
Fotodiody
Rozdělení podle konstrukce :
Hrotové diody - Základem diody s wolframovým hrotem je destička germania
typu N, na kterou je pružně přitlačován hrot wolframového drátku. Elektrickým
impulsem (tzv. formováním) vznikne pod hrotem vysoká teplota a tou se pozmění
krystalová struktura germania, která se pak chová jako malá oblast P.
Plošné diody - Základem plošných diod je destička křemíku typu N, ve které se difuzní technologií vytvoří vrstva typu P. Křemíková destička je připájená na kovovou podložku, která pomáhá odvádět teplo. Používá se v různých druzích usměrňovačů.
Kapacitní diody - Jsou to plošné křemíkové diody, u kterých se využívá závislosti kapacity u přechodu PN na přiloženém napětí ve zpětném směru. Kapacitní diody určené k ladění rezonančních obvodů se nazývají varikapy. Kapacitní diody určené pro obvody s velkými amplitudami ST napětí se nazývají varaktory.
obr. 50 - Charakteristika kapacitní diody
Usměrňovací dioda - plošné diody s přechodem PN, usměrňují proudy od několika mA po 105 A.
Stabilizační dioda - Zenerova
je plošná křemíková dioda s velmi tenkým přechodem PN. Ve zpětném směru
se charakteristika vyznačuje ostrým zlomem při dosažení tzv. Zenerova napětí.
Při tomto napětí je v oblasti přechodu PN tak silné elektrické pole, že
elektrony jsou vytrhávány ze svých vazeb, a to vede k prudkému nárůstu
zpětného proudu při téměř stálém napětí. Této části charakteristiky se využívá
pro udržování stálého SS napětí (stabilizaci) v elektronických obvodech.

obr. 51 - Skutečná VA charakteristika Zenerovy diody

obr. 52 - VA charakteristika tyristoru
|
Schematická značka tyristoru:
|
Skutečný vzhled tyristoru:
obr . 54 - Skutečné tyristory |
Vlastnosti tyristoru:
Proud řídící elektrody Ig k řízení tyristoru se odebírá ze zvláštního zdroje impulsů.
Funkci tyristoru lze znázornit zapojením dvou tranzistorů:
obr. 52 - Náhradní schéma tyristoru
4.3 Diak
Struktura diaku je pětivrstvá. se
čtyřmi přechody PN a dvěma hlavními vývody A1 ,A2 ,
které se většinou nazývají první anoda, druhá anoda. Pokuda by nebyly oba
krajní přechody PN vyrobené speciálním způsobem, byl by diak v závěrném stavu
pro kladnou i zápornou polaritu napětí U. Krajní přechody PN můžou být
tunelové nebo jsou částečně zkratované kovovými kontakty hlavních vývodů.α
Po připojení dostatečně velkého kladného nebo záporného U = U napětí, nazývaného spínací napětí se diak zapíná. V zapnutém stavu protéká diakem proud, který je ohraničen vnějším odporem obvodu. Napětí na diaku je tehdy relativně malé, dosahuje několika Voltů.
obr. 53 - VA charakteristika diaku
Schematická značka diaku:
obr. 54 - Schematická značka diaku
Triak je řízená polovodičová součástka se třemi vnějšími elektrodami, tedy polovodičová trioda. Má pětivrstvou strukturu, proti tyristoru má výhodu, že může spínat obě polarity napětí. V podstatě nahrazuje dva paralelně zapojené tyristory.

obr. 55 - VA charakteristika triaku
|
Schematická značka triaku:
obr. 56 - Schematická značka triaku
|
Skutečný vzhled triaků:
obr. 57 - Reálné triaky |
Bipolární tranzistory
Název tranzistoru vychází ze základní vlastnosti prvku, kterou je schopnost rídící elektrody báze malým proudem měnit odpor řízeného obvodu mezi kolektorem a emitorem. Činnost tranzistoru je založena na vzájemné interakci mezi dvěma přechody PN. V prvním přiblížení si lze tranzistor představit jako dvě diody zapojené proti sobě. Dioda báze - emitor se zapojuje v propustném směru a dioda báze - kolektor je polarizována závěrně. Protože báze je extrémně tenká a emitor je velmi silně dotován, dojde při průchodu proudu mezi bází a emitorem k zahlcení báze nosiči náboje. Ve všech vrstvách tranzistoru pak budou volné nosiče náboje, což umožní průchod proudu i přes závěrně polarizovaný přechod báze - kolektor.
Proud protékající kolektorem může být až tisíckrát vyšší než řídící proud tekoucí bází. Tranzistor pracuje tedy jako zesilovač proudu. Podobně jako u diody i ve značce tranzistoru ukazuje šipka směr protékajícího proudu, což usnadňuje zapamatování správného zapojení tranzistoru.
obr. 58 - Orientace obvodových veličin u PNP a NPN tranzistoru
Charakteristiky tranzistoru
Na vstupu se tranzistor chová jako dioda v propustném směru, a proto je závislost vstupního proudu IB na vstupním napětí prakticky shodná s charakteristikou diody. Ze sklonu vstupní charakteristiky lze určit statický a dynamický vstupní odpor tranzistoru.
Bipolární tranzistor zesiluje proud, a proto se nejčastěji kreslí proudová převodní charakteristika jako závislost výstupního proudu na vstupním. Ze sklonu této charakteristiky lze odečíst statické a dynamické proudové zesílení. Protože křivka se blíží přímce, která prochází počátkem, obě hodnoty proudového zesílení tranzistoru se téměř neliší. Výrobci často uvádějí přímou závislost proudového zesílení h21E na výstupním proudu IC.
Ze vstupní a proudové převodní charakteristiky lze sestrojit napěťovou převodní charakteristiku. Sklon této charakteristiky určuje strmost tranzistoru. Obě převodní charakteristiky nejsou lineární ani v pracovní oblasti a jsou zakřiveny opačným směrem. Pro dosažení minimálního zkreslení proto není vhodný ani tvrdý a ani měkký zdroj signálu. Optimální je impedančně přizpůsobený zdroj.
Vstupní charakteristiky jsou poměrně málo závislé na změnách ve výstupním obvodu, a proto se většinou kreslí pouze jediná charakteristika. Ve výstupních charakteristikách je proud tranzistorem funkcí vstupního proudu (napětí) a výstupního napětí. Pro zobrazení funkce dvou proměnných do dvourozměrné plochy je nutné zvolit jednu proměnnou konstantní. Jako konstantní parametr se volí vstupní veličina. Z charakteristik vyplývá, že při buzení z tvrdého napěťového zdroje zesílení roste a při buzení ze zdroje proudu zesílení s rostoucím vstupním proudem klesá. Z hlediska linearity zesílení je výhodnější měkčí zdroj.
Jednotlivé výstupní charakteristiky jsou téměř rovnoběžné s osou výstupního napětí. Vyplývá z toho, že pro velikost výstupního proudu IC je rozhodující vstupní veličina ( IB nebo UBE) a na změně výstupního napětí UCE proud téměř nezávisí.
Tranzistor se chová na výstupní straně jako zdroj proudu s velmi velkým vnitřním odporem. Velikost dynamické vnitřní vodivosti opět určuje sklon charakteristiky pro zvolený pracovní bod.
Volba pracovního bodu tranzistoru
Pokud se jedním tranzistorem zesiluje střídavý signál, je opět nutné pootevřít tranzistor stejnosměrným posuvem (tzv. zesilovač třídy A). Bez tohoto klidového proudu by totiž tranzistor pracoval jako výkonový usměrňovač. Optimální velikost klidového vstupního proudu IBP a následně i výstupního proudu ICP je obtížné určit. Při malém i velkém proudu IC klesá proudové zesílení. S rostoucím proudem narůstá prudce i vlastní šum tranzistoru, který navíc závisí i na vnitřnícm odporu generátoru signálu. Rovněž narůstá zbytkový proud tranzistorem. Při malých proudech zase nelze dosáhnout velkého napěťového a výkonového zisku tranzistoru.
Volba vhodného pracovního bodu je proto vždy kompromisem a liší se podle umístění tranzistoru v zesilovacím řetězci. Na vstupu se pracuje s velmi malými signály, takže je nutné volit pracovní bod tak, aby se dosáhlo co největšího zesílení, popř. dobré linearity zesilovače.
Šum tranzistoru se skládá z tepelného šumu, výstřelového a blikavého šumu a popisuje se šumovým činitelem F, což je podíl výkonů signál/šum na vstupu ku výkonům signál/šum na výstupu. Často se tento poměr vyjadřuje v decibelech jako tzv. šumové číslo FdB. Pro velmi hrubý odhad průběhu šumu lze použít rovnici:
|
|
(89) |
Mezní a tranzitní kmitočet
Elektrony a díry se polovodičem prodírají poměrně malou rychlostí a s rostoucím kmitočtem tranzistor ztrácí schopnost zesilovat proud. Při vysokých kmitočtech je navíc nutné uvažovat komplexní charakter parametrů tranzistorů. Například pro proudové zesílení platí:
|
|
(90) |
kde h210 je zesílení pro velmi nízký kmitočet. Modul (velikost) komplexního zesílení se určí z Pythagorovy věty:
|
|
(91) |
Při nízkých kmitočtech lze zanedbat druhý člen jmenovatele a zesílení je přibližně konstantní (h21≈ h210). Od mezního kmitočtu f MEZ lze naopak zanedbat jedničku a zesílení je nepřímo úměrné kmitočtu:
 |
(92) |
Z této rovnice lze určit i tzv. tranzitní kmitočet fT, při kterém klesne zesílení na jedničku a tranzistor přestane zesilovat:
| fT = h210 . f MEZ. |
(93) |
Praktičtější je určení fT z libovolného bodu na klesající části charakteristiky:
| fT = h21 . f. |
(94) |
Vliv teploty na vlastnosti tranzistoru
Vlastnosti polovodičových prvků jsou značně teplotně závislé. S rostoucí teplotou vzrůstá závěrný proud přechodem a zmenšuje se prahové napětí přechodu. Teoreticky je sice možné udržovat konstantní teplotu celého zařízení termostatem, anebo jak u elektronek zvolit velmi vysokou provozní teplotu zařízení, takže relativně malé teplotní změny okolí se neprojeví, ale nejjednodušší je zvolit takové zapojení, které minimalizuje vliv teplotních změn. K teplotní kompenzaci se používají buď prvky s opačnou teplotní závislostí, anebo se využívá stabilizačních účinků zpětné vazby.
U starších germaniových tranzistorů protékal závěrně polarizovaným přechodem kolektor-báze poměrně velký zbytkový proud ICB0. Tento proud vyvolal na vnitřním odporu vstupního zdroje RB úbytek napětí, který se přičítal ke vstupnímu napětí. Protože zbytkový proud se při zvýšení teploty o deset stupňů zdvojnásobí, bylo by nutné pro minimalizaci vlivu teploty použít poměrně tvrdý vstupní zdroj s malým RB.
Křemíkové tranzistory mají zbytkový proud přechodu velmi malý a proto jej lze včetně teplotního nárůstu zanedbat. Rozhodujícím faktorem u křemíku je posuv charakteristiky. Napětí v propustném směru se zmenšuje s rostoucí teplotou přibližně se strmostí 2 mV/K. Aby se neměnil s teplotou i proud diodou báze-emitor, je nutné, aby zatěžovací přímka protínala charakteristiku diody téměř kolmo. Tomu odpovídá velmi měkký zdroj, takže u křemíkových tranzistorů je naopak vhodné zapojení velkého odporu RB.
| Schematické značky tranzistoru:
|
Skutečný vzhled tranzistorů:
obr. 63 - Reálné tranzistory v různých pouzdrech
|
Princip funkce bipolárního tranzistoru:
obr. 64 - Princip funkce přechodu NPN
Na obrázku vidíme velmi zjednodušeně základní
strukturu bipolárního tranzistoru. Bipolární tranzistor nazýváme tak proto, že
se v jeho funkci účastní nosiče náboje obou polarit. Bipolární tranzistor se
skládá ze dvou přechodů PN, které jsou odděleny je velmi tenkou vrstvou
polovodiče. Podle toho, zda střední vrstva je typu P nebo typu N rozeznáváme
bipolární tranzistory typu NPN nebo PNP
Základní zapojení bipolárního tranzistoru je rovněž znázorněno na obrázku 3.26. Spočívá v tom, že jeden přechod PN je pólován v propustném směru vůči střední části a zbývající vůči téže části v závěrném směru. Vnější elektrodu tranzistoru přiléhající k přechodu pólovanému v propustném směru nazýváme emitorem , střední část bází a zbývající elektrodu kolektorem.
Typy PNP a NPN se rozlišují směrem šipky u emitoru. Někdy se kroužky znázorňující kryt tranzistoru nekreslí, nicméně to na funkci nic nemění.
Jako příklad využití zde uvádím zapojení se společným emitorem. Na tomto obrázku je zakreslen jednostupňový tranzistorový zesilovač se společným emitorem.
obr. 65 - Zapojení se společným emitorem
Zapojení se společným emitorem se používá nejčastěji, má poměrně velký vstupní a výstupní odpor, velké napěťové, proudové a výkonové zesílení. Obrací fázi vstupního signálu o 180° (mění polaritu U)
Napěťové zesílení:
| Au = U2 / U1 |
(95) |
Zisk:
| Au = 20* log U2 / U1 [dB] |
(96) |
Simulaci tohoto zapojení si můžete stáhnout zde.
Zapojení se společnou bází:
obr. 66 - Zapojení se společnou bází
Zapojení se společnou bází má malý vstupní a velký výstupní odpor, velké napěťové a výkonové zesílení, ale malé proudové zesílení.
Zapojení se společným kolektorem:
obr. 67 - Zapojení se společným kolektorem
Zapojení se společným kolektorem - emitorový sledovač - má velký vstupní a malý výstupní odpor (používáme jej jako impedanční transformátor), malé napěťové, ale velké proudové a výkonové zesílení.
Emitorové U sleduje napěťové průběhy v bázi, proto toto zapojení nazýváme také emitorový sledovač.
Unipolární tranzistor
Vedle bipolárního tranzistoru existuje i tranzistor unipolární. Potřeba aktivního prvku v pevné fázi s vysokým vstupním odporem vedla k objevu a konstrukci tzv. tranzistorů řízených polem, jinak nazývaných FET (z anglického field effect transistor). Jsou to tranzistory, jejichž fyzikální princip funkce je odlišný od principu, na kterém pracují bipolární tranzistory. Řídicí elektrodou tranzistorů typu FET teče buď jen velmi malý proud ekvivalentní proudu diody v závěrném směru, nebo je tato řídicí elektroda izolovaná od řízeného obvodu vrstvičkou SiO2, takže jí neteče prakticky žádný proud.
Unipolární tranzistor nemá dva polovodičové přechody a při řízení činnosti využívá nosiče náboje pouze jednoho druhu. Proud nosičů nepotřebuje vstupní proud, ovládá se elektrickým polem – napětím. Odtud dostaly tranzistory název „tranzistory řízené elektrickým polem“. Běžně je označujeme zkratkou FET, která je složena z počátečních písmen anglických slov „Field effect tranzistors“.
Výstupní proud FET se řídí výhradně elektrickým polem, tj. obejde se bez proudu vstupní elektrody. Znamená to zcela odlišný způsob činnosti uvnitř tranzistoru. S tím dále souvisí vstupní odpor. U tranzistorů FET je vstupní odpor nesrovnatelně vyšší, v porovnání s bipolárnímu tranzistory. Dalšími výhodami jsou velmi malý šum i při vysokých kmitočtech malý odběr I a v neposlední řadě i jednoduchou výrobní technologii zajišťující velkou hustotu integrace v integrovaných obvodech.
Tranzistor FET si můžeme
představit také jako polovodičový rezistor, třebaže nelineární, na rozdíl od
běžného rezistoru. V takovém případě FET ovlivňuje průchod proudu, stejně jako
rezistor, je-li zařazen do obvodu. Jeho vodivost (odpor) řídíme změnou
elektrického pole.
Operační zesilovač byl původně používán jako základní jednotka analogových počítačů, diferenciálních analyzátorů. V posledních letech s rozvojem hybridních a později monolitických integrovaných obvodů se stal operační zesilovač samostatnou jednotkou, elektronickým prvkem. Operační zesilovač používaný ve fyzikálním měření nemusí být ovšem pouze v monolitické formě, ale může být buď v hybridní formě nebo dokonce sestaven z diskrétních prvků.
Vedle použití operačních zesilovačů v analogových
počítačích, kde byl hlavně používán pro základní aritmetické operace sečítání,
odečítání, dělení a násobení a rovněž pro integraci analogových signálů, se dnes
používá i v řadě elektronických obvodů jako jsou stejnosměrné i střídavé
zesilovače, komparátory, elektronický vzorkovací obvod (vrátka, gate), klopné
obvody, aktivní filtry, převodníky z analogového signálu na číselnou hodnotu a
naopak.
V této kapitole vzhledem k všestrannému použití
operačních zesilovačů budou podány jeho základní vlastnosti s ohledem na jeho
možné fyzikální aplikace.
Velmi zjednodušené schéma operačního zesilovače je na obrázku 68. První, velmi důležitou částí operačního zesilovače je vstupní rozdílový zesilovač. Musí zesílit rozdílové napětí ud 1000 až 10000 krát. Další částí je druhý stupeň tvořený tranzistory T5a, T5b v Darlingtonově zapojení. Vstupní proud této kombinace je velmi malý a neovlivňuje proto vlastnosti rozdílového zesilovače (nezatěžuje jej). Napěťové zesílení je 100 až 300, protože se jedná o zapojení zesilovače se společným emitorem (a proudovým zdrojem v kolektoru). Kondenzátor Ck (korekční kondenzátor) zamezuje nežádoucím kmitům operačního zesilovače. Může být přímo součástí integrovaného obvodu (operační zesilovač s vnitřní korekcí) nebo se může připojovat jako vnější součástka. Posledním dílem každého operačního zesilovače je výstupní stupeň. Zde jej tvoří komplementární emitorový sledovač (T6, T7), jeho napěťové zesílení je přibližně jednotkové. Výstupní stupeň zabraňuje tomu, aby zatěžovací odpor na výstupu ovlivňoval zesílení druhého stupně - odděluje zátěž od předchozích stupňů s napěťovým zesílením.
Při tak jednoduché konstrukci, jako je na obrázku, můžeme připojit zatěžovací odpory asi 2 kΩ (a větší) a pro napětí u0 = 10 V prochází zatěžovací proud 10 V / 2 kΩ = 5 mA. Předpokládejme, že proudový zesilovací činitel tranzistorů t6 a T7 je alespoň 50. Bázový proud tranzistorů T6 a T7 je potom vždy menší než než 5 mA / 500 = 100 μA a to je hodnota mnohem menší než proud dodávaný zdrojem proudu Ik. (Zdroj proudu Ik je obvod, který dodává do obvodu stále stejný proud v Ik, bez ohledu na velikost napětí na jeho výstupu). Druhý stupeň proto není zátěží příliš ovlivněn.
Předpokládejme, že proudové zesilovací činitele tranzistorů T5a a T5b jsou stejné a rovny hodnotě 50. Výsledný proudový zesilovací činitel Darlingtonova zapojení je β = 50 . 50 = 2500. Protéká-li kolektorem T5b proud Ik = 1 mA, vtéká do báze tranzistoru T5a proud - 1mA / 2500 = 0,4 μA. to je opět hodnota mnohonásobně menší než je proud proudového zdroje IE. Druhý stupeň proto podstatně neovlivní zesílení rozdílového stupně.
obr. 68 - Vnitřní zapojení operačního zesilovače
|
Schematická značka operačního zesilovače:
obr. 69 - Schematická značka operačního zesilovače
|
Skutečný vzhled operačního
zesilovače v kovovém pouzdru:
obr. 70 - Reálný operační zesilovač |
Operační zesilovač má dva vstupní obvody: invertující a neinvertující. Při zavedení signálu na invertující vstup se na výstupu operačního zesilovače objeví signál v opačné fázi, zatímco při přivedení signálu na neinvertující vstup je signál na vstupu a výstupu operačního zesilovače ve fázi.
Zapojení jako invertor:
Inverzní funkci k funkci f můžeme realizovat zapojením nelineárního členu do obvodu zpětné vazby
obr. 71 - Invertující zapojení operačního zesilovače
Simulaci tohoto zapojení si můžete stáhnout zde
Chceme-li realizovat logaritmující nebo exponenciální zesilovače, můžeme použít jako nelineárního členu polovodičové diody nebo tranzistoru v tak zvaném diodovém zapojení.
obr. 72 - Diodové zapojení operačního zesilovače
Simulaci tohoto zapojení si můžete stáhnout
zde
Pro napětí na diodě je závislost výstupního napětí na napětí vstupním logaritmická.
Základní zapojení tzv. Millerova integrátoru ukazuje obrázek , pro který lze odvodit operační rovnici pomocí následujících vztahů:
|
i1 + iC = iI = 0 , (ZI → ∞) |
(97)
|
|
(98)
|
|
(99)
|
Kde jsou T = RC .......časová konstanta integrátoru
UC(t0) .......napětí na kondenzátoru před začátkem v čase t0
Časová konstanta integrátoru je definována jako doba, za kterou jsou si rovny absolutní hodnoty napětí na vstupu a výstupu integrátoru při skokové změně vstupního napětí (obrázek ). Hodnotu časové konstanty lze měnit při použitém zapojení podle obrázku .princip změny časové konstanty ukazuje obrázek Pro časovou konstantu pak platí vztah:
|
T = 1/α RC , α
|
(100) |
Nevýhodou integrátoru podle obrázku je "ujíždění" výstupního napětí integrátoru až do nasycení i při nulovém vstupním napětí, které je způsobeno klidovým vstupním proudem a napěťovou nesymetrií vstupů operačního zesilovače. Proto je nutné vhodným způsobem eliminovat tyto vlivy, případně omezit zesílení integrátoru na velmi nízkých frekvencích paralelním rezistorem Rp ke kondenzátoru. V případě střídavého integrátoru, který zpracovává pouze střídavý signál, je možné eliminovat "ujíždění" integrátoru připojením PI regulátoru stejnosměrné složky, jehož parametry je nutné měnit v závislosti na frekvenci vstupního napětí.
Na obrázku 73 je vidět nejběžnější zapojení integračního zesilovače. Do obvodu záporné zpětné vazby je připojen kondenzátor. Pro vstupní proud (virtuální zem) platí:
|
i = ui (t).I.R |
(101) |
Veškeré proudy tečou do kondenzátoru C. Pro výstupní napětí platí u0 = - uc. Pro napětí kondenzátoru C platí:
|
|
(102) |
 obr. 73 - Zapojení integrujícího zesilovače
|
Průběhy vstupního napětí u0 (t) integrátoru pro:
obr. 74 - Průběh vstupního a výstupního napětí když ui (t) = Ui > 0
obr. 75 - Průběh vstupního a výstupního napětí když ui (t) = -Ui < 0
|
Simulaci tohoto zapojení si můžete stáhnout zde
V praxi je obvykle integrační obvod propojen tak, aby bylo možno zvolit tři pracovní režimy integračního obvodu:
1. Režim nastavení počátečních podmínek (sepnutý kontakt b , rozepnutý kontakt a ).
2. Režim integrace (sepnutý kontakt a , rozepnutý kontakt b ).
3. Režim paměti (režim při rozepnutém kontaktu a i b ).
obr. 76 - Praktické zapojení integračního zesilovače
Zapojení jako derivátor:
Derivační zesilovače se používají často při měření vibrací - z derivace lze určit rychlost vibrace. Pomocí derivace lze také odhalit malé (ale rychlé) změny na značných (úrovní), pomalu se měnících signálech - např. zákmity, špičky apod.
Principiální zapojení derivačního zesilovače je zřejmé z obrázku. Pro proud I platí :
|
|
(103) |
je-li u =0. Potom
|
|
(104) |
Chování obvodu ve frekvenční oblasti lze snadno určit, že jde o invertující zesilovač se ziskem
|
|
(105) |
Zesílení se zvětší na každé zdvojení frekvence dvakrát (+6 dB/okt).
Je zřejmé, že zapojení na obrázku zdůrazňuje vyšší kmitočty. Fázový posuv vede k
nestabilitě derivačního zesilovače. Tyto problémy lze vyřešit zapojením
doplňujících prvků R, C podle obrázku . Odpor R omezí růst zisku,
kondenzátor C dokonce vede k poklesu zisku nad určitý kmitočet (C není nutný,
lze využít vlastního poklesu
![]() ).
Nejčastěji se volí R1C = RC1 (oblast kritického úhlového
kmitočtu:
).
Nejčastěji se volí R1C = RC1 (oblast kritického úhlového
kmitočtu:
|
|
(106) |
Potom se zapojení chová na nízkých kmitočtech (ω<ωk)jako derivační zesilovač, na vysokých kmitočtech (ω>ωk) se chová jako integrační zesilovač.
 obr. 77 - Derivační zesilovač |
 obr. 78 - Odezva derivačního zesilovače na vstupní trojúhelníkové napětí; menší strmosti ui odpovídá i menší výstupní napětí |
Prakticky se však uvedeného zapojení nepoužívá, neboť derivátor má obrácenou frekvenční charakteristiku než integrátor a při derivování se zesiluje napětí tím více, čím má vyšší frekvenci. Pokud se nelze derivování vyhnout, používá se upravených obvodů, které omezují zesílení na vyšších kmitočtech. Jedním z používaných obvodů je kombinace derivačního a integračního obvodu:
|
obr. 79 - Reálné zapojení derivačního zesilovače |
obr. 80 - Závislost přenosu na frekvenci pro reálný derivační zesilovač |
Simulaci tohoto zapojení si můžete stáhnout zde
Zapojení jako sumátor:
Součtový invertující zesilovač se třemi vstupy je na obrázku. Počet vstupů lze libovolně zvětšit, mělo by se však brát v potaz, že zbytečné zvyšování počtu vstupů je nevýhodné. Invertující vstup OZ je v tomto zapojení virtuální zemí. Proto platí, že:
|
i1 = u1 / R1, i2 = u2 / R2, i3 = u3 / R3 |
(107) |
Pro ideální OZ platí:
|
iR = i1 + i2 + i3 |
(108) |
veškeré proudy protékají přes zpětnovazební odpor R. Nyní již lze určit, že
|
u0 = - i R = - (u1R/ R1 + u2R/ R2 + u2R/ R2). |
(109) |
Pro R1 = R2 = R3 = R dostaneme známý vztah
|
- u0 = u1 + u2 + u3 |
(110) |
Vstupní odpor pro každý signál ui je dán odporem Ri (na který je signál přiveden). Všechny vlastnosti jsou stejné jako u invertujícího zesilovače.
obr. 81 - Součtový invertující zesilovač
Tímto způsobem se realizuje například sčítací nebo odčítací člen ve zpětně vazbě regulačního obvodu.