Seřízení regulátoru („Modularita systému
Control Web 2000 na nejnižší úrovni“)
Zadání:
1. Změřte
přechodovou charakteristiku zadané soustavy a určete její typ a parametry.
2. Změřte
statickou charakteristiku zadané soustavy.
3. Navrhněte
typ a parametry regulátoru (např. metoda inverze dynamiky).
4. Realizujte
algoritmus regulace s Vámi navrženými parametry.
5. Vyjádřete
se k průběhu regulace a zhodnoťte ji.
Schéma zapojení:
Obr.1 Logická provázanost úlohy " Seřízení regulátoru "
Obr.2 Vzájemné propojení jednotlivých lokálních modulů úlohy
" Seřízení regulátoru"
Teoretický rozbor:
V systému
Control Web 2000 je vytvořena aplikace, která se skládá z několika modulů a ty
rozdělují celý projekt na jednotlivé funkční bloky. Projekt obsahuje moduly pro
vizualizaci, pro řízení a ovládání, pro měření charakteristik (statických a
přechodových) a moduly Ctrl a Dominoputer, které slouží pro přístup na reálná
zařízení.
Všechny
moduly běží na stejném počítači a aplikace je tvořena spolupracujícími moduly. To
znamená, že nastane-li chyba v některém z modulů, dojde k zastavení celého
projektu.
Modul
„Menu“
Tento modul
slouží k zobrazování jednotlivých panelů. Panel obsahuje virtuální přístroje „multi_switch“.
Po vybrání patřičného modulu z nabídky a potvrzení tlačítkem, se objeví pro
příslušnou skupinu daný panel. V tomto panelu se může předem nastavit, jestli
chci data archivovat či nikoliv. Dále si můžeme nastavit parametr (název
archivního souboru – číslo souboru). Například pro archivaci PID regulace nastavím
1 a pro přechodovou charakteristiku nastavím 2. Na disku ve složce „Archivy“ se
uloží dva soubory s příponou *.dbf.

Obr.3 Vzhled okna modulu „MENU“
Modul
„Ctrl“
Modul „Ctrl“
zprostředkovává komunikaci mezi Control Web 2000 a teplovzdušným modelem resp.
CTRL jednotkou, pomocí DDE komunikace. Zde si můžeme nastavit, který vstupní a
výstupní kanál bude aktivní a podle toho bude probíhat celé měření.
Panel také
obsahuje nápovědu k zapojení vstupních a výstupních kanálů jednotky CTRL.
Obr.4 Vzhled okna modulu „Ctrl“
Modul
„Dominoputer“
Modul
Dominoputer zprostředkovává komunikaci mezi Control Web 2000 a modulovým
systémem Dominoputer, pomocí ovladače DOMINO. Modul obsahuje jeden vstupní a
jeden výstupní kanál. V této úloze je použito nastavení rozsahu vstupu/výstupu
0 až 10V.
Obr.5 Vzhled okna modulu „Dominoputer“
Moduly
„Přepínač výstupů“ a "Přepínač IO zařízení"
Modul
"Přepínač výstupů" slouží k napojení výstupu vstupně/výstupního
zařízení. Modul obsahuje virtuální přístroj multiplexer, který není v panelu a
je neviditelný. Jeho funkce je zřejmá z obr.6. Moduly I/O zařízení svá
data pro vybraný výstupní kanál přiřazují proměnné "vystup" v modulu
"Přepínač výstupů"
Obr.6 Funkce modulu "Přepínač výstupů"
Modul
„Přepínač IO“ slouží k napojení vstupu I/O zařízení. Jeho funkce je zřejmá z obr.7.
Obr.7 Funkce modulu "Přepínač IO zařízení"
Na vstupní
kanály multiplexeru jsou přivedeny vstupy jednotlivých I/O zařízení a podle
výběru zařízení potažmo jeho kanálů jsou přiváděny do proměnné vstup modulu
Přepínač IO.
Moduly
nacházející se ve vrstvě "I/O zařízení" poskytují data (vstupy)
modulům nacházející se ve vrstvě "funkční" prostřednictvím vrstvy "propojení".
Moduly
nacházející se ve vrstvě "funkční" poskytují data (výstupy) modulům
nacházející se ve vrstvě "I/O zařízení" prostřednictvím vrstvy "propojení".
Modul
pro PID regulaci
Pro regulaci
byl vytvořen panel viz. obr.6 s možností zadávaní následujících parametrů
regulace:
·
Žádaná
hodnota - hodnota může být zadána v rozmezí 0 až 10V.
·
Parametry regulátoru - tj. zesílení, integrační konstanta a derivační konstanta.
·
Doba regulace – doba, po kterou je regulátor
aktivní.
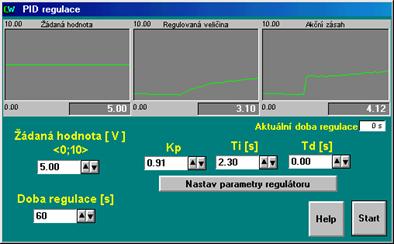
Obr.6 Okno lokálního modul "PID regulace“
Modul pro PID
regulaci obsahuje číslicový regulátor, který podle dvou vstupních numerických
výrazů - žádaná a regulovaná hodnota - vypočítá akční zásah (výstup). Žádaná
hodnota je hodnota, kterou požadujeme a regulovaná hodnota se k ní snaží
přiblížit.
Modul
pro dvoupolohovou regulaci
Modul pro
dvoupolohovou regulaci obsahuje dvoupolohový regulátor, který podle dvou
vstupních numerických výrazů - žádaná a regulovaná hodnota - vypočítá akční
zásah (výstup) - zapnuto/vypnuto. Pro dvoupolohovou regulaci byl vytvořen panel
viz. obr.7 s možností zadávání parametrů regulace.
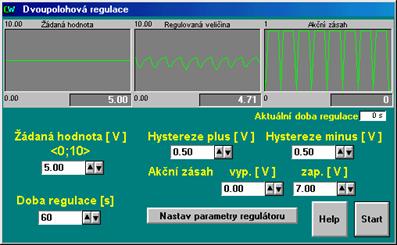
Obr.7 Okno lokálního modul "Dvoupolohová regulace"
Modul
pro přechodovou charakteristiku
Modul pro
přechodovou charakteristiku je tvořen jedním panelem obr.8. Jak již bylo
řečeno, aplikace je obecná a lze k ní připojit jakoukoliv soustavu, která má
normované vstupní a výstupní signály. Takže i tento modul lze využít pro měření
přechodových charakteristik libovolného
modelu.
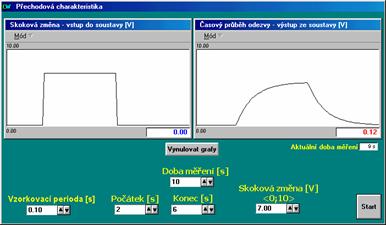
Obr. 8 Okno lokálního modulu "Přechodová
charakteristika"
Modul
pro statickou charakteristiku
Modul pro
statickou charakteristiku je tvořen jedním panelem obr.9. Statická charakteristika
je závislost výstupní veličiny na vstupní veličině po skončení přechodových
dějů. Parametry, které se mohou zadat v tomto modulu jsou zřejmé z obr.9.
Vysvětlení jejich funkce je popsáno v okně "Help". Naměřené hodnoty
se ukládají do *.dbf souboru, který se ukládá do složky „Statická“. Tento
soubor lze otevřít v MS Excelu.
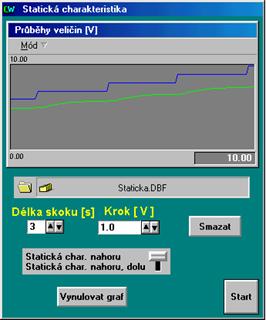
Obr. 9 Okno lokálního modulu "Statická charakteristika"
V modulu
"Archivace" se provádí archivace dat. Archivovaná data jsou
zapisována do souboru po záznamech. Každý záznam je ještě doplněn o položky
časových značek archivace. Do položky s názvem DATE (typ datum, délka 8) je
ukládána informace o datu archivace a do položky s názvem TIME (znaková, délka
8) čas archivace záznamu. Zapínáni a vypínáni archivace se provádí v okně „Menu“.
Vzhledem k
modularitě této aplikace je možno vytvořit vizualizace více úloh, a podle
připojené technologie se lze mezi nimi přepínat.
Propojení
úlohy se síti Internet pomocí HTTP Serveru
Do vzdáleného
modulu pomocí ovladače TCP/IP jsou shromážděný potřebné informace (proměnné z
aplikace). V tomto modulu je umístěn virtuální přístroj HTTP, který umožňuje
zpřístupnit (vizualizovat i řídit) aplikaci běžící v systému Control Web 2000 z
libovolného WWW prohlížeče přes TCP/IP síť - ať už lokální Intranet nebo
celosvětový Internet. Přitom na straně klienta (WWW prohlížeče) není zapotřebí
instalovat Control Web 2000 runtime ani žádnou jinou část systému Control Web
2000.
Postup měření:
1.
Seznamte se s aplikaci v systému
Control Web 2000 určenou pro měření, identifikaci … .
2.
Seznamte se s stavebnicí DOMINOPUTER a sestrojte
RC obvod realizující soustavu dle zadání vedoucího cvičení.
3. Proveďte konfiguraci okna pro měření přechodové charakteristiky a změřte ji pro zadanou soustavu. Určete parametry a typ soustavy.
4.
Podle časových konstant nastavte parametry okna
pro měření statické charakteristiky a změřte ji pro zadanou soustavu.
5.
Podle výsledků předcházejících měření určete typ
a parametry vhodného regulátoru.
6.
Ověřte jeho funkci na reálné soustavě s pomocí
modulu „PID regulátor“ .
7.
Zhodnoťte dosažené výsledky.
Podkladem pro
tento návod byla bakalářská práce [MATĚJ 2001].
Otázky:
1.
Co je to přechodová charakteristika?
2.
Co je to statická charakteristika?
3.
Jak postupujeme při seřízení regulátoru metodou
inverze dynamiky?