Části výsledků Bakalářských a Diplomových prací studentů jsou využity v projektech vzniklých na základě požadavků z praxe. Ve spolupráci s průmyslem jsou generovaná také některá zadání Bakalářských a Diplomových prací.
- CAN rozhraní pro MEMS (akcelerometry)
Pro měření přenosů části mechanických struktur byl vyvinut modul (y) na bázi MEMS. Most mezi CAN sběrnicí a I2C (SPI) rozhraním MEMS akcelerometrů je realizován pomocí jednočipového počítače řady PIC. Toto rozhraní umožňuje synchronizovat čtení dat z jednotlivých akcelerometrů a provádět konfiguraci vnitřních registrů jednotlivých MEMS akcelerometrů přes CAN rozhraní.
- Kalibrace provozních tlakoměrů
 V rámci spolupráce s průmyslem byl řešen návrh systému, který umožňuje pravidelnou kalibraci provozních snímačů tlaků. Ta se provádí 2x ročně. V případě stovek snímačů je na místě vytvořit systém, který po konfiguraci na začátku měření bude pracovat plně automaticky, nezávislé na obsluze. Vstupními požadavky bylo, aby se využíval jeden měřicí systém, pro zpracování naměřených dat se využíval Excel, ve kterém už byly naprogramovány makra pro vyhodnocení naměřených dat. Dalšími požadavky byla možnost volby rozsahů měření, počtu cyklů měření (1-3), počtu měřených bodů charakteristiky apod. Konfiguračním (řídicím) systémem je standardní PC (IPC), pomocí kterého lze provádět konfiguraci, spuštění, zastavení celého měření apod. Řízení (PID regulaci) lze realizovat buď přímo na IPC, nebo externě pomocí konfigurovatelného regulátoru. Druhá varianta je použitá při realizaci. Regulátor je ve variantě návrhu systému propojen s konfiguračním IPC pomocí RS 485. Pomocí rozhraní RS 232 (USB) je připojen měřicí přístroj indikující aktuální měřenou veličinu tj. hodnotu tlaku z jednotlivých snímačů.
V rámci spolupráce s průmyslem byl řešen návrh systému, který umožňuje pravidelnou kalibraci provozních snímačů tlaků. Ta se provádí 2x ročně. V případě stovek snímačů je na místě vytvořit systém, který po konfiguraci na začátku měření bude pracovat plně automaticky, nezávislé na obsluze. Vstupními požadavky bylo, aby se využíval jeden měřicí systém, pro zpracování naměřených dat se využíval Excel, ve kterém už byly naprogramovány makra pro vyhodnocení naměřených dat. Dalšími požadavky byla možnost volby rozsahů měření, počtu cyklů měření (1-3), počtu měřených bodů charakteristiky apod. Konfiguračním (řídicím) systémem je standardní PC (IPC), pomocí kterého lze provádět konfiguraci, spuštění, zastavení celého měření apod. Řízení (PID regulaci) lze realizovat buď přímo na IPC, nebo externě pomocí konfigurovatelného regulátoru. Druhá varianta je použitá při realizaci. Regulátor je ve variantě návrhu systému propojen s konfiguračním IPC pomocí RS 485. Pomocí rozhraní RS 232 (USB) je připojen měřicí přístroj indikující aktuální měřenou veličinu tj. hodnotu tlaku z jednotlivých snímačů.
- Polohování a synchronizace ultrazvukové sondy
 Systém, který vznikl v rámci řešení tříletého projektu GAČR, zajišťuje polohování ultrazvukové sondy při vyšetření krčních tepen. Výsledkem řešení je komplexní měřicí systém, umožňující měřit objem aterosklerotického plátu (AS plátu) v definované oblasti. Posuv je řízený a synchronizován se srdeční činností. K tomu se využívá pacientský monitor. Následně získané snímky umožňují vytvořit 3D model artérií. Opakovatelným měřením a následným vyhodnocením lze zjistit dlouhodobý trend 3D modelu. Celý systém je postavený na bázi jednočipového počítače řady PIC. Ten generuje řídicí řetězce pro komerční jednotku CD30M, která je zároveň výkonovým členem pro řízení (ovládání) krokového motoru. Komunikace je zajištěna pomocí standardní sériové linky. Algoritmus v jednočipovém procesoru je vytvořený tak, aby příkazy generované pro komerční jednotku byly synchronizovány se srdeční činností a vlastní skenování řezu nebylo ovlivněno ani srdeční činností pacienta ani pohybem (přesunem) senzoru. Na této lince je také zapojen příposlech pro komunikační rozhraní řídicí jednotky s PC, kde se ukládají časy a pozice senzoru do textového souboru. Na tomto PC se nahrává také záznam z ultrazvukové sondy s časovými značkami a videosekvence pro pozdější vyhodnocení. Generování příkazů je trigrováno z výstupu pacientského monitoru, kde úroveň signálu je 1V a ne TTL. Proto je použit převodník ADC0831 komunikující s mikrokontorlérem po sériové komunikaci podobné I2C.
Systém, který vznikl v rámci řešení tříletého projektu GAČR, zajišťuje polohování ultrazvukové sondy při vyšetření krčních tepen. Výsledkem řešení je komplexní měřicí systém, umožňující měřit objem aterosklerotického plátu (AS plátu) v definované oblasti. Posuv je řízený a synchronizován se srdeční činností. K tomu se využívá pacientský monitor. Následně získané snímky umožňují vytvořit 3D model artérií. Opakovatelným měřením a následným vyhodnocením lze zjistit dlouhodobý trend 3D modelu. Celý systém je postavený na bázi jednočipového počítače řady PIC. Ten generuje řídicí řetězce pro komerční jednotku CD30M, která je zároveň výkonovým členem pro řízení (ovládání) krokového motoru. Komunikace je zajištěna pomocí standardní sériové linky. Algoritmus v jednočipovém procesoru je vytvořený tak, aby příkazy generované pro komerční jednotku byly synchronizovány se srdeční činností a vlastní skenování řezu nebylo ovlivněno ani srdeční činností pacienta ani pohybem (přesunem) senzoru. Na této lince je také zapojen příposlech pro komunikační rozhraní řídicí jednotky s PC, kde se ukládají časy a pozice senzoru do textového souboru. Na tomto PC se nahrává také záznam z ultrazvukové sondy s časovými značkami a videosekvence pro pozdější vyhodnocení. Generování příkazů je trigrováno z výstupu pacientského monitoru, kde úroveň signálu je 1V a ne TTL. Proto je použit převodník ADC0831 komunikující s mikrokontorlérem po sériové komunikaci podobné I2C.
- Aktivní tlumení vibrací
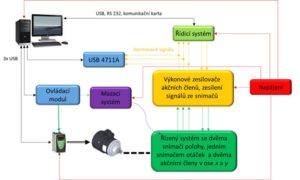 Pro vysokootáčkové rotační stroje se využívají kluzná ložiska. Ta jsou mazána olejem a mezi rotační částí (hřídelem) a ložiskem vzniká olejový film. Ten při vyšších otáčkách způsobí, že se hřídel v ložisku rozkmitá s amplitudou závislou např. na vůli hřídele. Za tímto účelem bylo vytvořeno testovací zařízení (rotorkit), osazeno snímači polohy hřídele v blízkosti obou ložisek v ose x a y, a 4-mi akčními členy (piezoactuatory), které umožňují pozicovat ložisko v domečku ložiska a tím eliminovat kmitání rotoru. Tímto způsobem lze posunout rezonanční otáčky systému do vyšších otáček.
Pro vysokootáčkové rotační stroje se využívají kluzná ložiska. Ta jsou mazána olejem a mezi rotační částí (hřídelem) a ložiskem vzniká olejový film. Ten při vyšších otáčkách způsobí, že se hřídel v ložisku rozkmitá s amplitudou závislou např. na vůli hřídele. Za tímto účelem bylo vytvořeno testovací zařízení (rotorkit), osazeno snímači polohy hřídele v blízkosti obou ložisek v ose x a y, a 4-mi akčními členy (piezoactuatory), které umožňují pozicovat ložisko v domečku ložiska a tím eliminovat kmitání rotoru. Tímto způsobem lze posunout rezonanční otáčky systému do vyšších otáček.
- Bezdrátový přenos dat mobilních zařízení
 Problémovým může být přenos dat z mobilních nebo rotujících zařízení. Takovým příkladem je záznam dosažených časů a počtů projetých okruhů jednotlivých motokár (mobilní zařízení) do vyhodnocovacího pracoviště s PC během závodu. Celý systém je navržen tak, aby přenos dat probíhal on-line tj. v době průjezdu motokáry přes hraniční (cílovou) zónu jednotlivých kol závodu. V případě pohybujícího se objektu je nutno uchovat čas průjezdu jednotlivých kol ve vysílači pro případné následné vyčtení offline. Bylo vytvořeno několik variant pro testování celého systému. Například varianta na bázi vysílačů a přijímačů pracujících na frekvenci 433,92 MHz. Nevýhodou je jednosměrná komunikace z motokáry do vyhodnocovací stanice v případě využití jednoho modulu. Jeden modul neobsahuje vysílač i přijímač, ale jen jedno ze zařízení (vysílač nebo přijímač). Další testovanou variantou bylo použití Xbee modulů, využívající frekvenci 2,4 GHz. Mají v sobě implementován jak vysílač, tak přijímač. Interface pro komunikaci s mikrokontrolérem je realizována pomocí TTL úrovně přímo na Rx a Tx pinech modulu. Výhodou těchto dvou typů modulů je jednoduchá obsluha vysílacího a přijímacího zařízení (podobná obsluha jako standardní sériové linky umožňující přímo přístup k Tx a Rx signálům). Další možností je využití RFM12B, které pracují s frekvenčním pásmem 868 MHz, ale jejichž rozhraní pro komunikaci s mikrokontrolérem je na bázi SPI komunikace. Tyto moduly obsahují jak vysílač, tak přijímač. Nutností je vytvoření knihoven pro konfiguraci těchto modulů ze strany mikrokontroléru.
Problémovým může být přenos dat z mobilních nebo rotujících zařízení. Takovým příkladem je záznam dosažených časů a počtů projetých okruhů jednotlivých motokár (mobilní zařízení) do vyhodnocovacího pracoviště s PC během závodu. Celý systém je navržen tak, aby přenos dat probíhal on-line tj. v době průjezdu motokáry přes hraniční (cílovou) zónu jednotlivých kol závodu. V případě pohybujícího se objektu je nutno uchovat čas průjezdu jednotlivých kol ve vysílači pro případné následné vyčtení offline. Bylo vytvořeno několik variant pro testování celého systému. Například varianta na bázi vysílačů a přijímačů pracujících na frekvenci 433,92 MHz. Nevýhodou je jednosměrná komunikace z motokáry do vyhodnocovací stanice v případě využití jednoho modulu. Jeden modul neobsahuje vysílač i přijímač, ale jen jedno ze zařízení (vysílač nebo přijímač). Další testovanou variantou bylo použití Xbee modulů, využívající frekvenci 2,4 GHz. Mají v sobě implementován jak vysílač, tak přijímač. Interface pro komunikaci s mikrokontrolérem je realizována pomocí TTL úrovně přímo na Rx a Tx pinech modulu. Výhodou těchto dvou typů modulů je jednoduchá obsluha vysílacího a přijímacího zařízení (podobná obsluha jako standardní sériové linky umožňující přímo přístup k Tx a Rx signálům). Další možností je využití RFM12B, které pracují s frekvenčním pásmem 868 MHz, ale jejichž rozhraní pro komunikaci s mikrokontrolérem je na bázi SPI komunikace. Tyto moduly obsahují jak vysílač, tak přijímač. Nutností je vytvoření knihoven pro konfiguraci těchto modulů ze strany mikrokontroléru.
- Stavebnicový systém s jednočipovým počítačem řady PIC
Pro jednoduché pochopení principů programování jednočipových procesorů pomocí vývojového prostředí s vyšším programovacím jazykem, ale i pro programování v asembleru a následné nasazení v distribuovaných systémech řízení, byla navrhnuta základní deska umožňující přístup k technickým prostředkům (vnitřním modulům) jednočipového počítače řady PIC16F87x. Tento jednočipový počítač obsahuje moduly podporující komunikaci po standardním sériovém rozhraní, I2C, SPI rozhraní, dále pak moduly A/D vstupů a PWM výstupů, v neposlední řadě standardní diskrétní vstupy a výstupy. V prostředí EAGLE byla navržena základní deska, obsahující nejnutnější externí obvodové prvky a I/O, nutné pro základní funkci mikropočítače. To vše umožňuje následné nasazení tohoto modulu při výuce distribuovaných systémů řízení.