VYSOKÁ ŠKOLA BÁŇSKÁ – TECHNICKÁ UNIVERZITA OSTRAVA
FAKULTA STROJNÍ
Elektronické systémy
Přesné řízení stejnosměrných motorů
Vypracoval: Michal Kubín
Akademický rok: 2007/2008
Semestr: zimní
Obsah
Obsah…………………………………………………………………………………. 2
Zadání………………………………………………………………………………… 3
Úvod………………………………………………………………………………….. 4
Zařízení………………………………………………………………………………. 5
EPOS P 24/5 a EPOS 24/5………………………………………………… 5
MCD EPOS P………………………………………………………………….. 8
EPOS 24/1………………………………………………………………………. 9
Motory………………………………………………………………………….. 12
Zpracování………………………………………………………………………… 12
Software……………………………………………………………………………. 13
Instalace………………………………………………………………………… 13
Nastavení jednotlivých jednotek………………………………………. 14
Ukázkové ověření funkcí…………………………………………………. 18
Regulation Tuning………………………………………………………….. 20
Programování………………………………………………………………… 21
Pracovní úlohy…………………………………………………………………… 22
Autotuning…………………………………………………………………….. 22
Nastavení udržování polohy…………………………………………….. 23
Nastavení konstantních otáček…………………………………………. 24
Řízení Proudem……………………………………………………………… 24
Závěr………………………………………………………………………………… 25
Zadání
- Seznamte se s modelem a proveďte konfiguraci jednotlivých jednotek, motorů a komunikačních kanálů.
- Vyzkoušejte a zhodnoťte možnosti automatické ladění jednotlivých jednotek a k nim připojených motorů.
- Vyzkoušejte a zhodnoťte u jednotlivých jednotek a motorů přesné nastavení polohy hřídele a možnost držení polohy hřídele.
- Vyzkoušejte a zhodnoťte u jednotlivých jednotek a motorů přesné nastavení otáček hřídele a možnost zachování otáček hřídele při vlivu poruchové veličiny.
- Vyzkoušejte a zhodnoťte u jednotlivých jednotek a motorů řízení napájecím proudem. Zjistěte u jednotlivých motorů minimální proud na roztočení hřídele, proud na zachování otáček a proud pro zachování otáček se zátěží.
Úvod
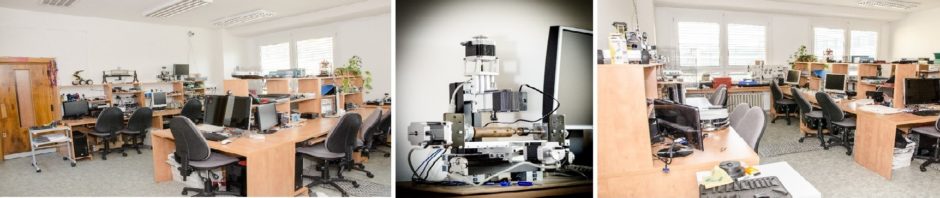
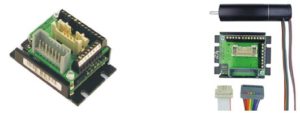
Pro zpracování úlohy bylo k dispozici sada jednotek EPOS, a několik motorů připojitelných k těmto jednotkám. Celkem se jednalo o 5 jednotek SPOS, 4 motory a sada kabelů (Obr. 1). Konkrétně bylo k dispozici:
- EPOS P 24/5 – univerzální programovatelná (master) jednotka pro motory s vyšším výkonem
- EPOS 24/5 – univerzální neprogramovatelná (slave) jednotka pro motory s vyšším výkonem
- EPOS 24/1 – jednoúčelová neprogramovatelná (slave) jednotka pro motory s nižším výkonem s možností připojení encoderu
- EPOS 24/1 – jednoúčelová neprogramovatelná (slave) jednotka pro motory s nižším výkonem s možností připojení encoderu a hallova senzoru
- MCD EPOS P 60W – programovatelná jednotka s integrovaným pohonem
- MAXON EC-MAX – výkonový motor s napájením z EPOSu, hallovým (inkrementačním) snímačem a encoderem
- MAXON DC – výkonový motor s napájením z EPOSu, integrovaným hallovým snímačem a převodovkou
- A-MAX – motor pro připojení k EPOS 24/1 s encoderem
- MAXON EC – motor pro připojení k EPOS 24/1 s encoderem a halovým snímačem

Obr.1 Vybavení k dispozici
Všechny jednotky EPOS jsou schopny komunikovat pomocí sběrnice RS-232 a CAN. Úloha byla navržena tak, aby bylo co nejvíce využito komunikace mezi jednotlivými zařízeními. Dalším parametrem při rozvržení bylo, aby bylo možné všechny komponenty ovládat jak programem v programovatelné jednotce, tak i manuálně pomocí PC. Celá úloha byla tedy koncipována do dvou samostatných skupin. Jednu skupinu tvoří jednotky EPOS 24/5 s výkonovými motory, kde master jednotka komunikuje s PC pomocí RS-232 a se slave jednotkou pomocí CAN. Druhá úloha se pak skládá z jednotek EPOS 24/1 a MCD EPOS. Jednotka MCD (master) komunikuje s PC pomocí RS232 a s jednotkami 24/1 (slave) komunikuje pomocí CAN. Schéma komunikace můžeme vidět na Obr. 2.
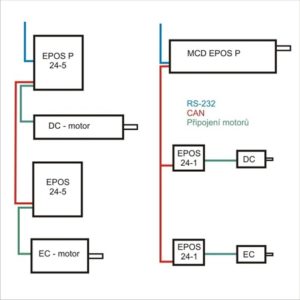
Obr. 2 Rozvržení komponent na panelu a jejich komunikační vazby
Zařízení
Zařízení jsou určena pro lehkou průmyslovou automatizaci, jako je ovládání pohonů relé, přesné polohování klapek a podobně. Zařízení si popíšeme podrobněji:
EPOS P 24/5 a EPOS 24/5
EPOS 24/5 (Obr. 3) je malá plně digitální jednotka řízení polohy. Flexibilní a vysoce účinná jednotka EPOS 24/5 může být použita s kartáčovými DC motory s inkrementálním snímačem stejně jako s bezkartáčovými EC motory s hallovými sondami a inkrementálním snímačem. Sinusový průběh proudu při komutaci nabízí řízení EC motorů s minimálním zvlněním momentu a nízkou hlučností. Integrované řízení polohy, rychlosti a proudu umožňuje sofistikované aplikace při polohování. Jednotka je navržena aby byla řízena a ovládána jako SLAVE uzel v síti CANopen. Navíc jednotka může být provozována přes port RS232.

Obr. 3 Jednotka EPOS 24/5
Jednotka je vybavena třemi kontrolními led, zelená signalizuje bezchybný chod, červená chybový stav, modrá signalizuje chod programu, popřípadě ovládání pomocí RS-232. Na boku jednotky je 8 přepínačů (modro-bílé přepínače je vidět na Obr. 3), kterými se nastavuje adresa jednotky na sběrnici CAN (8bit).
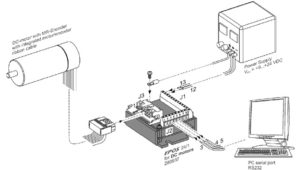
Obr. 4 Připojení jednotky EPOS 24/5
Připojení motorů k jednotce mžeme vidět na Obr. 4, k této jednotce lze připojit většinu dodávaných motorů. Tato jednotka může pracovat jako slave řízená pomocí RS-232, tak i jako autonomní programovatelný automat.

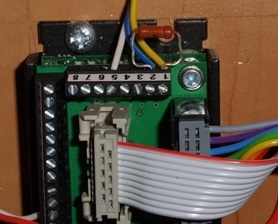
Obr. 5 Osazení konektorů jednotky
Jednotka disponuje rovněž několika I/O porty, jak je vidět na Obr. 5. Na tomto obrázku lze také vidět úplné osazení všech konektorů jednotky. Vidíme zde ovládání motorů, připojení hallova senzoru, připojení encoderu, RS-232, CAN, napájení a I/O portů. V případě použití komunikace po CAN, je třeba sběrnici na koncích terminovat odporem 120Ω. Terminace se provádí terminačním členem (Obr. 6) zapojeným do neosazeného konektoru jednotky.

Obr. 6 Terminační člen
Mezi jednotkami EPOS P 24/5 a EPOS 24/5 je základní rozdíl v tom, že jednotka s „P“ je programovatelná a je schopná fungovat jako MASTER, zatímco jednotka bez „P“ může fungovat pouze jako SLAVE. I proto na SLAVE jednotce nenajdeme modrou LED, která detekuje činnost programu.
MCD EPOS P
Jednotka MCD je víceméně totožná s jednotkou EPOS 24/5. Její odlišnost spočívá v tom, že je v ní integrován motor (Obr. 7). Tato jednotka obsahuje dva konektory, jejichž popis (jak je vidět na Obr. 7 je popsán na boku jednotky). Tyto konektory umožňují připojit napájení, RS-232, CAN a I/O porty. Tato jednotka má defaultně přiřazenou adresu „1“ na sběrnici CAN, a pokud ji potřebujeme změnit, je to možné pomocí programovacího SW. U této jednotky (pokud je na konci sběrnice) není třeba CAN terminovat.

Obr. 7 MCD EPOS P
Tato jednotka má na zadním panelu kromě konektorů také dvě kontrolní LED. Jedna je dvoubarevná (červená/zelená) a druhá modrá. Tyto led signalizují stav chodu jednotky stejný způsobem, jako u EPOS 34/5.

Obr. 8 Umístění konektorů na jednotce MCD EPOS P
Motor integrovaný v této jednotce má jak hallův inkrementální snímač otáček, tak i encoder.
Nevýhodou této jednotky je však to, že při poruše motoru je potřeba vyměnit celé zařízení, což je finančně náročné.
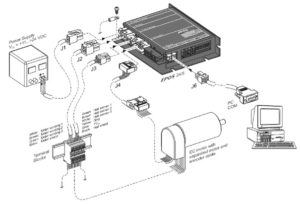
Na Obr. 8 vidíme umístění konektorů na jednotce MCD EPOS P, jejich osazení a možné zapojení pak můžeme vidět na Obr. 9. Pro připojení k těmto konektorům slouží kabelová sada, která byla dodána spolu se sadou motorů a jednotek. Jeden z konektorů je klasický 9ti pinový canon, přes který je připojeno napájení, CAN sběrnice a sběrnice RS-232. Druhý pak 3řadový 15-ti pinový konektor pro připojení I/O portů jak je znázorněno na Obr. 9.
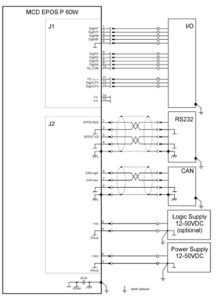
Obr. 9 Schéma zapojení konektorů MCD EPOS P
EPOS 24/1
Jednotky EPOS 24/1, jsou velmi podobné jednotkám EPOS 24/5. Mají stejné programovací prostředí, I/O porty i komunikaci po RS-232 a CAN. Tyto jednotky jsou určené pro připojení jen některých typů motorů – jednotka kvůli své malé velikosti neumožňuje osazení více konektorů pro připojení různých druhů motorů. Proto jsou k dispozici samostatně jednotky pro DC (Obr. 10) a EC (Obr. 11) motory. Na Obr. 13 vidíme zapojení jednotek EPOS 24/1. Toto zapojení je společné pro všechny jednotky EPOS 24/1, mění se pouze připojení motorů, ale osazení svorkovnic je stejné.
Schéma zapojení vidíme na Obr. 14, kde je vidět i zapojení CAN a I/O portů. Při připojení CAN je potřeba pamatovat na to, že sběrnice CAN musí být na začátku i na konci terminována odporem 120 Ω, který je zapojen mezi kontakty CAN High a CAN Low. Stačí, když odpor přichytíme pod kabel sběrnice členu, který je umístěn jako poslední na sběrnici, jak můžeme vidět na Obr. 12.

Obr. 10 EPOS 24/1 pro DC motory s integrovaným kabelem pro motor a
Obr. 11 EPOS 24/1 pro EC motory
Obr. 12 Terminace na EPOS 24/1
Obr. 13 Zapojení EPOS 24/1
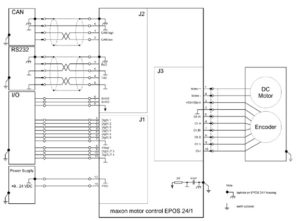
Obr. 14 Schéma zapojení EPOS 24/1
Motory
Jak již bylo zmíněno, byly dodány 4 samostatné motory a jeden s integrovanou řídicí jednotkou. Z těchto motorů jsou dva motory EC a dva DC. EC motor má vestavěný hallův senzor přímo v těle motoru, zatímco DC motor tento senzor nemá. Všechny motory jsou vybaveny enkoderem namontovaným na zadním víku motoru (u malých motorů vestavěny v zadním víku).
Všechny motory obsahují komutátor, avšak klasické uhlíkové kartáče jsou vyměněny za kartáče nové generace vyrobeným z pružných plechů, dotýkajících se komutátoru, jak je vidět na Obr. 15.
Tyto nové kartáče mají několik výhod:
- díky šikmému doteku s komutátorem mají nižší opotřebení, – kvůli malé styčné ploše s komutátorem nevzniká jiskření,
- nevzniká uhlíkový prach z opotřebených kartáčů.

Obr. 15 Řez DC motorem – pružné kartáče na komutátoru
Zpracování
Celá soustava je umístěna na dřevěném panelu, který je znázorněn na Obr. 16. Všechny komponenty jsou připevněny k desce pomocí spon a přírub zhotovených z plechu, nastříkaného barvou. Síla plechů jednotlivých držáků je volena podle váhy a namáhání komponent (0,75 – 3mm). Tyto držáky jsou přišroubovány do desky pomocí vrutů.
Panel je rozdělen, jak již bylo zmíněno na dvě poloviny. Nalevo jsou výkonové jednotky EPOS 24/5 a nalevo pak jednotky EPOS MCD a dvě jednotky EPOS 24/1. Jak je vidět z Obr. 2 je vždy programovatelná jednotka (EPOS P a EPOS MCD) připojena pomocí sběrnice RS-232 připojena k PC. Připojení k PC je realizováno kvůli možnému programování, ladění jednotlivých sestav a online řízení jednotek.
Všechny jednotky jsou navzájem propojeny pomocí sběrnice CAN. Jak již bylo zmíněno, je potřeba konce CAN sběrnice terminovat tak, že mezi CAN-HIGH a CAN-LOW je připojen odpor 120 Ω.
Celá soustava je napájena pomocí 12V stabilizovaného zdroje s výkonem 5A. Tento výkon je pro nezatíženou sestavu dostačující, avšak při maximálním zatížení všech motorů nemusí dostačovat. Proto by měly být úlohy zkoušeny jednotlivě a neměly by být zatíženy všechny motory současně. Rozvod napájení je veden za svorkovnice umístěné pod zdrojem v levém horním rohu panelu.
Jak je vidět z Obr. 16 je napájení taženo vždy žluto-červeným, nebo bílo-červeným kabelem, RS232 červeno-bílo-modro-žluto-zeleným kabelem a CAN pak červeno-bílo-modrým kabelem. Všechny kabely jsou připojeny do svorkovnic a konektorů podle manuálů dodaných k jednotlivým zařízením. Pouze u jednotky EPOS P MCD jsou kabely zapojeny připojeny pomocí 9ti pinového konektoru canon.

Obr. 16 Situování součástí na výukovém panelu
Software
K zařízením jsou dodávány různé software. Jeden pro ovládání neprogramovatelných jednotek a druhý k jednotkám programovatelným. Tyto software umožňují jak nastavení jednotlivých soustav, odladění komunikace a nabídky řešení problémů také různá programovací prostředí pro naprogramování jednotek EPOS P a EPOS P MCD.
Instalace
Instalace software je jednoduchá a krom určení místa instalace a potvrzení licenčních podmínek neklade instalační balík další dotazy. Je však potřeba nainstalovat jak Configuration EPOS studio, tak i Programming EPOS studio. Tato programy jsou dodávány s jednotlivými komponenty a to včetně manuálů k těmto komponentům. Všechnu dokumentaci a software je možno získat z webu výrobce http://www.maxonmotor.com/downloads.asp, kde pomocí vyhledávání můžeme najít potřebné dokumenty k zařízením.
Nastavení jednotlivých jednotek
Po instalaci je potřeba jednotlivé soustavy nakonfigurovat. Konfigurace je potřebná, z důvodu že program není schopen sám identifikovat architekturu dané sestavy.
Konfigurace probíhá po spuštění EPOS Studia. Po spuštění vyskočí okno s nabídkou nového projektu (Obr. 17). Zde si vybereme, s jakou jednotkou chceme pracovat (vybíráme vždy jednotku, která je připojena k PC pomocí sběrnice RS-232). V našem příkladu si ukážeme konfiguraci levé strany panelu s jednotkami EPOS 24/5.
V této sestavě je připojena k PC pomocí RS-232 jednotka EPOS P 24/5, proto zvolíme při
vytváření projektů „EPOS P Project“ a pokračujeme tlačítkem „Další >“.

Obr. 17 Založení nového projektu v EPOS Studiu
Poté budeme vyzváni k nastavení cesty, kam má být projekt uložen (Obr. 18). Dáme dokončit a ukáže se nám prázdné prostředí EPOS Studia. Jak je vidět na Obr. 18 jsou v levém panelu znázorněny jednotky, a jejich přeškrtnutí značí, že nejsou správně nakonfigurovány a zapojeny.
Pro jejich konfiguraci klikneme na jednotku „EPOS P“ v nabídce pravým tlačítkem, najedeme na „Wizards“ a spustíme „StartupWizard“ (Obr. 20). Tento průvodce nás provede nastavením jednotky a motorů k nim připojeným.
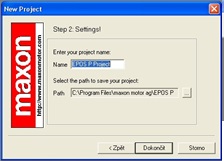
Obr. 18 Nastavení uložení projektu
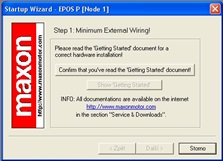
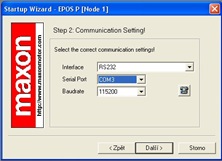
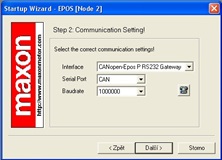
Jako první krok nás vyzve upozornění, abychom si dali pozor na rotační části. Toto varování je třeba potvrdit velkým tlačítkem (Obr. 21), kterým potvrdíme, že jsme si přečetli dokumentaci a jsme seznámeni s možnými riziky. Poté stiskneme tlačítko další. Poté nastavíme komunikaci s jednotkou. V naší úloze je to pomocí RS-232, COM-3
(pro levou část panelu), jak je vidět na Obr. 21. Opět potvrdíme nastavení tlačítkem „Další“ a přejdeme k dalšímu panelu.

Obr. 19 Prázdné prostředí EPOS Studia

Obr. 20 Spuštění konfigurátoru
Obr. 21 Potvrzení bezpečnostních varování
 Obr. 22 Nastavení komunikace
Obr. 22 Nastavení komunikace
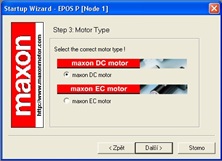
Dalším panelem je výběr připojeného motoru. Zde si zvolíme, zda jde o DC, nebo EC motor. Tyto hodnoty získáme z těla motoru, kde je to vyobrazeno (v případě školní úlohy se můžeme orientovat dle rozvržení na Obr. 2). U tohoto příkladu, který si popisujeme, je k programovatelné jednotce (EPOS P) připojen DC motor, který zvolíme a pokračujeme tlačítkem „Další“ jak je znázorněno na Obr. 23. Poté nastavíme parametry motoru (můžeme je vyčíst z dokumentace, popřípadě zvolit defaultní) jak je vidět na Obr. 23.
Obr. 23 Výběr typu motoru
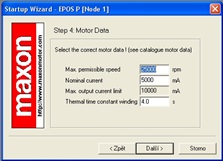
Obr. 24 Nastavení parametrů motoru
Poté nakonfigurujeme snímače, jimiž je daný motor osazen. V našem případě jde o dvoukanálový inkrementální encoder (Obr. 25), vybereme jej a pokračujeme dále. V dalším kroku natavení určíme rozlišení encoderu v krocích/otáčku jak vidíme na Obr. 25 (rovněž můžeme nechat defaultní) .
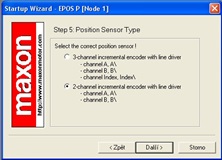
Obr. 25 Výběr snímačů na motoru

Obr. 26 Nastavení rozlišení encoderu
V posledním kroku je vypsána konfigurace jednotky (Obr. 27) a posléze následuje dotaz na
uložení konfigurace a upozornění, že data jsou uložena a nastavení jednotky jeaktivní (Obr. 27).
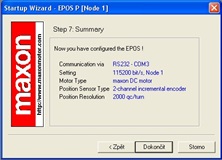
Obr. 27 Výpis hodnot nastavení motoru
Obr. 28 Potvrzení uložených dat
Tímto je skončena konfigurace hlavní (programovatelné) jednotky. V hlavní okně EPOS Studia zvolte vlevo dole záložku „Comunication“. Poté se změní zobrazení, na strom komunikace jednotlivých zařízení, jak je vidět na Obr. 29. Z tohoto stromu je vidět, že zde není zobrazena druhá jednotka. Pro zobrazení druhé jednotky je potřeba ji najít a nakonfigurovat.
To uděláme tak, že klikneme pravým tlačítkem na nápis „CAN“ na posledním řádku levého panelu a zvolíme „Scanning Device“ (Obr. 29).

Obr. 29 EPOS Studio po nakonfigurování jednotky
Vyskočí nám okno skenování sběrnice CAN (Obr. 30), kde zvolíme „Start Scanning“. Sken můžeme nechat doběhnout do konce, nebo po nalezení potřebného zařízení jej můžeme zastavit tlačítkem „Stop Scanning“. Poté označíme hledané zařízení a tlačítkem „OK“ jej uložíme.

Obr. 30 Skenování CAN sběrnice
Tímto krokem se nám objeví zařízení v levém panelu programu. Toto zařízení je však přeškrtnuto červeným křížkem, což znamená, že není připojeno. Připojit jej můžeme tak, že klikneme na požadované zařízení (řádek se označí modře) a poté klikneme na ikonu v horním panelu. Tímto se zařízení připojí a červený křížek u něj se změní, na červené kolečko s bílým křížkem uprostřed (Obr. 31). Tato značka znamená, že zařízení je připojeno, ale není správně nakonfigurováno.
Pro konfiguraci na zařízení klikneme pravým tlačítkem, v menu zvolíme „Wizards“ a pak „Sartup Wizard“ (Obr. 31).

Obr. 31 Nastavení zařízení na sběrnici CAN
Vlastní konfigurace je velmi podobná s konfigurací po sběrnici RS-232. Liší se jen v úvodním kroku, kde se nastavují parametry CAN sběrnice (Obr. 32). Ostatní kroky jsou totožné. V našem případě (levá část panelu), je k slave jednotce připojen EC motor s hallovým snímačem.
Obr. 32 Konfigurace jednotky připojené pomocí CAN
Ukázkové ověření funkcí
Program EPOS Studio má v sobě vestavěnou řadu ukázkových funkcí, které si můžeme vyzkoušet a osahat bez toho, abychom museli jakkoliv vytvářet program. Tímto způsobem můžeme vyloučit špatné nastavení jednotek, motorů atd.
K těmto funkcím se dostaneme tak, že klikneme pravým tlačítkem na požadovanou položku a v menu si vybereme nabídku „Tools“ (Obr. 33). V této nabídce vidíme vesměs všechny funkce, které jednotka dokáže používat. Jezde:
- sledování událostí,
- řízení jednotky,
- profil pozicování,
- přesné nastavení chodu motoru (akcelerace, decelerace),
- profil přesného nastavení otáček motoru,
- držení přesné pozice,
- nastavení otáček motoru,
- proudový režim (ovládání proudem),
- snímání encoderu,
- hlídání kroku motoru, – záznam dat motoru do grafu,
- monitor I/O portů jednotky.

Obr. 33 Výčet ověřovacích funkcí
Tyto funkce slouží k nastavování a zjištění funkcí jednotky a chování jednotlivých motorů. Můžeme si zde odladit, zda výkon motorů bude dostačující pro danou úlohu, jaký bude mít příkon a podobně. Nastavování jednotlivých panelů je víceméně shodné, pro ukázku jednoho z nich se můžeme podívat na Obr. 34, kde vidíme panel pro ovládání proudem. U každého panelu je potřeba režim nejdříve aktivovat (vpravo naoře), nastavit žádané hodnoty a potvrdit je (zde „Set Current“).

Obr. 34 Panel pro ovládání motoru nastaveným proudem
Regulation Tuning
Tato funkce je určená na doladění motoru v již zabudované soustavě, zadáme si zde parametry, jak by měla daná soustava fungovat a tato funkce nám pro ni vyhledá nejvhodnější parametry.
Do panelu Regulation Tuning se dostaneme tak, žena zvolenou jednotku klikneme pravým tlačítkem, v menu vybereme „Wizards“ a zvolíme „Regulation Tuning“ (Obr. 35).

Obr. 35 Spuštění Regulation Tuning
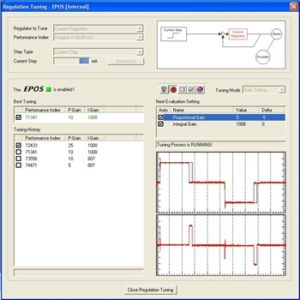
Poté nám vyskočí okno Ladící utility (Obr. 36). Zde si můžeme vybrat různé druhy ladění a
nastavit meze, do nichž se musí laděná soustava dostat.
Obr. 36 Okno ladící utility
Poté použijeme tlačítko , kterým odstartujeme automatické ladění. Automatické ladění pokračuje v několika smyčkách, kdy dolaďuje jednotliví parametry. Poté co se laděná soustava dostane do požadovaných hodnot, se ladění zastaví a oznámí optimální parametry. V případě, že se nepodaří nalézt optimální parametry, je možné upravit vstupní parametry a ladění opakovat. V průběhu ladění je možné sledovat hledanou veličinu a reálnou veličinu na grafech (Obr. 36).
Programování
Programování lze provádět přímo v EPOS Studiu. Do programovací části se dostaneme tak, že se přepneme do panelu „Tools“ a poté vybereme zařízení patřičné „EPOS P“ jak vidět na Obr. 37.

Obr. 37 Spuštění programovacího prostředí

Obr. 38 Vybrání projektu
Poté vybereme v bočním menu „IEC-61131 Programming“ a vybereme, jestli chceme otevřít existující, ukázkový nebo nový projekt (Obr. 38). Po zvolení patřičného projektu se nám otevře programovací prostředí. Tento SW umožňuje programovat v různých programovacích prostředích, jako jsou:
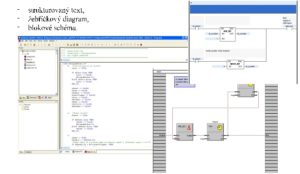
Obr. 39 Různá programovací prostředí
Pracovní úlohy
Na tomto modelu je možno realizovat více pracovních úloh. Zatím je model ve stavu, kdy ještě není zcela zvládnuto programování jednotlivých programovatelných modulů. Zatím je možné použít a vyzkoušet autotuning regulátorů a ověření funkčnosti jednotlivých funkcí modulů, jako je nastavení polohy motoru, nastavení otáček, nastavení akcelerace decelerace jednotlivých motorů, řízení otáček proudem a podobně.
Autotuning
Tato část je určena pro odladění regulátorů a získání optimálních hodnot P, I, D složek. Otevřete si okno „Regulation Tuning“ (návod najdete v kapitole Regulation Tuning).
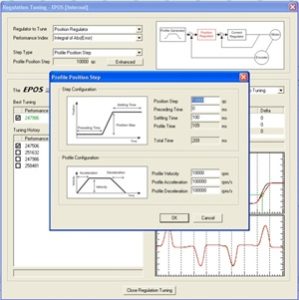
Po spuštění vyskočí okno, v němž nastavujeme parametry automatického ladění (Obr. 40). V prvním výběru vlevo nahoře si určíme druh regulátoru a na něm závislý vstupní signál. Změna regulátoru je znázorněna jako schéma v pravé horní straně okna. V druhém výběru si nastavujeme výkonový index a ve třetím výběru typ kroku. Pod posledním výběrem je tlačítko „Enhanced“ po jehož zmáčknutí vyskočí tabulka s rozšířeným zadáním vstupního signálu (Obr. 40). Po nastavení všech parametrů spustíme ladění ikonou . Ladění můžeme kdykoliv zastavit ikonou . Při ladění můžeme sledovat zkoušené hodnoty složek a na grafu žádaný a reálný průběh regulované veličiny. V případě nezastavení ladění, ladění pokračuje do nalezení optimálních parametrů regulátoru.
Vyzkoušejte si všechny typy regulátorů a vstupních signálů a zhodnoťte výsledky získané laděním. Zhodnoťte výsledky jednotlivých měření a vypište získané hodnoty.
Obr. 40 Okno automatického ladění regulátoru
Obr. 41 Okno rozšířeného nastavení vstupního signálu
Nastavení udržování polohy
Tato funkce má za úkol držení polohy hřídele v nastaveném stavu. Motor se chová tak, že se nastaví žádaná hodnota a poté tuto hodnotu udržuje i navzdory poruchovým veličinám. Toto udržování polohy jednotka zvládá až do doby než je překročen její výkon.
Spusťte si panel udržování polohy (popsáno v kapitole Ukázkové ověření funkcí – položka „Position mode“). Na obrazovce by se měl objevit panel (Obr. 42). Zde si tento panel aktivujeme pomocí tlačítka „Active Position Mode“ a nastavíme žádané hodnoty. Tyto hodnoty jsou:
- pozice (segmentech nastavených při konfiguraci motoru),
- P, I, D složky regulátoru
- MIN a MAX poziční limity.

Obr. 42 Panel Position Mode
Pro zpuštění aktivujeme jednotku EPOS pomocí tlačítka „disabled“ a nastavíme pozici tlačítkem „SetPosition“. Motor se nastaví do žádané polohy. Můžeme sledovat v rámečku „Actual Value“ hodnoty polohy hřídele získané z encoderu motoru. Jako ověření funkce vyzkoušejte nastavení různých parametrů a zkuste točit hřídelí ovládaného motoru a sledujte reakce na působící poruchovou veličinu. Zhodnoťte výsledky jednotlivých měření a vypište získané hodnoty.
Nastavení konstantních otáček
Obdobně jako v minulé úloze spusťte funkci „Velocity Mode“ (Obr. 43). Jako v předchozím případě aktivujeme panel tlačítkem „Active Velocity Mode“, poté nastavíme žádané otáčky a složky regulátoru P a I. Opět aktivujeme jednotku a zmáčkneme tlačítko „Set Velocity“. Motor můžeme kdykoliv zastavit tlačítkem „Halt“. Při úloze si vyzkoušejte obměnit jednotlivé parametry, jejichž hodnoty můžeme opět sledovat v rámečku „Actual Values“. Ověřte, jak se chová regulovaná soustava na vliv poruchové veličiny (brzděte rukou hřídel motoru). Zhodnoťte výsledky jednotlivých měření a vypište získané hodnoty.
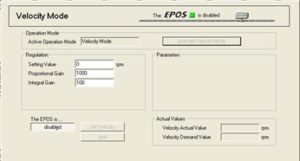
Obr. 43 Panel Velocity Mode
Řízení Proudem
Dalším úkolem je ověření možnosti řízení motoru pomocí proudu. Zvolte jako v předchozích případech panel „Current Mode“ (Obr. 44). Tento panel opět aktivujte jako panely v minulých případech a vyzkoušejte ovládání pomocí napájecího proudu motoru. Opět vyzkoušejte všechny možné varianty a hodnoty nastavení.
Zjistěte, při jakém minimálním proudu se motor roztočí z klidu, jaký minimální proud je potřeba k zajištění chodu točícího se motoru a jak se změní minimální proud při zatížení hřídele motoru. Zhodnoťte výsledky jednotlivých měření a vypište získané hodnoty.

Obr. 44 Panel Current Mode
Závěr
Byly zjištěny možnosti zařízení a na jejich základě navržen a vyroben panel pro studijní účely. Na tomto panelu jsou demonstrovány možnosti ovládání stejnosměrných kartáčových motorů a jejich řízení pomocí PLC jednotek. Jsou zde také demonstrovány různé druhy komunikace, jako RS-232, CAN, I/O porty atd.
Byly zde ověřeny možnosti ovládání jednotlivých motorů, možnosti jejich snímačů a jejich použití. Na panelu byly ověřeny všechny funkce řízení motorů, jako:
- automatické ladění regulátoru,
- řízení otáček,
- přesné nastavení polohy,
- nastavení křivek akcelerace a decelerace,
- sledování hodnot z encoderu,
- monitor I/O portů
- grafické zpracování jednotlivých veličin.
Jako další kroky realizované na tomto panelu je využití programování jednotlivých jednotek a navržení úloh ukázkového automatického řízení, jako například otáčení hřídele jednoho motoru o stejný krok jako motoru druhého otáčeného ručně. Dalším krokem by bylo vhodné využít I/O porty a na ně by bylo dobré napojit např. koncové snímače, nebo jiná zařízení snímání polohy. V závislosti na těchto snímačích by bylo možné zkonstruovat autonomní úlohu běžící na tomto panelu. Také by bylo vhodné nechat studenty v rámci laboratorních úloh nechat upravit připravené torza programů, nebo je nechat tvořit samostatně jednoduché programy v programovacím prostředí.