|
|
|
1. Úvod 2. Fyzikální základy 2.1 Základní vlastnosti polovodičů 2.2 Přechod PN 3. Součástky 3.1 Polovodičové diody 3.2 Tranzistory 3.2.1 Bipolární tranzistory 3.2.2 Unipolární tranzistory 3.3 Spínací polovidičové součástky 3.3.1 Dvoubázová dioda 3.3.2 Diak 3.3.3 Tyristory 3.3.4 Triak 3.4 Optoelektrické součástky 3.4.1 Fotorezistory 3.4.2 Fotodiody 3.4.3 Fototranzistory 3.4.4 Fototyristory 3.4.5 Elektroluminiscenční diody 3.4.6 Polovodičové lasery 3.4.7 Světlovody 3.4.8 Optrony 3.4.9 Zobrazovací jednotky 3.5 Polovodičové součástky bez PN přechodu 3.5.1 Varistory 3.5.2 Termorezistory 3.6 Integrované obvody 4. Elektronické obvody 4.1 Usměrňovače 4.1.1 Jednofázový jednocestný jednopulsní usměrňovač 4.1.2 Jednofázový dvoucestný dvoupulsní usměrňovač 4.2 Filtrace napětí 4.3 Zdvojovače a násobiče napětí 4.4. Základní zapojení tranzistorů 5. Seznam značení a zkratek 6. Literatura |
3.3 Spínací polovodičové součástky
Dioda se dvěma bázemi, často označovaná jako jednopřechodový tranzistor (UJT), je křemíková součástka s jedním přechodem PN a se třemi vyvedenými elektrodami nazývanými emitor E, báze B1, báze B2 (obr.3.20.)
Obr: 3.20. Struktura UJT a jeho VA charakteristika
Při nulovém napětí UBB se dvoubázová dioda chová ze strany emitoru jako běžná dioda. Je-li napětí UBB kladné, rozdělí se napětí rovnoměrně mezi bázemi B2, B1. V místě A základní polovodičové destičky vytvoří procházející proud IBB napětí:
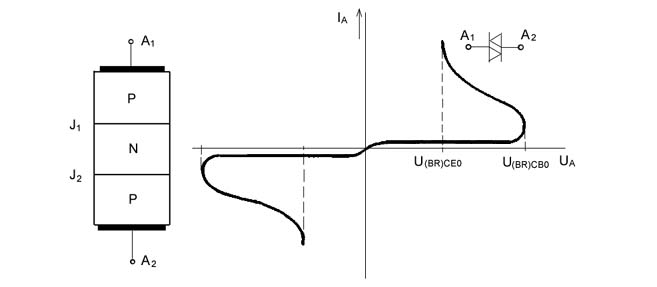
Obr: 3.21. Struktura a VA charakteristika diaku
Vlastnosti diaku vystihuje jeho VA charakteristika (obr. 3.21.), která je symetrická. Protože v sepnutém stavu má značný úbytek
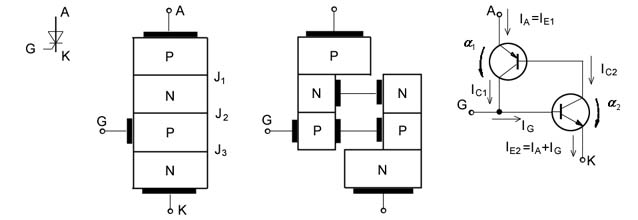
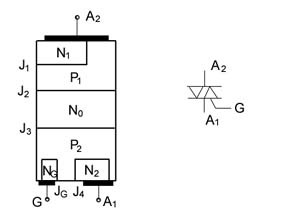
Tyristor je čtyřvrstvý polovodičový prvek se třemi PN přechody. Základem všech tyristorů je struktura NPNP nebo PNPN, která je nejvíce rozšířená. Podle počtu vývodů pak existují: diodový tyristor (dinistor), triodový tyristor (trigistor), tetrodový tyristor (binistor). Nejčastěji je v aplikacích využíván triodový tyristor, který je zkráceně označován jen jako tyristor. Podle umístění řídicí elektrody je možno rozlišit tyristor typu N nebo P.
Obr: 3.22. Struktura a náhradní schéma triodového tyristoru PNPN typu P
Po funkční stránce lze čtyřvrstvou strukturu nahradit zapojením dvou tranzistorů (obr. 3.22.), které mají společný kolektorový přechod. Principem činnosti těchto součástek je tzv. tyristorový jev, jehož vznik je podmíněn závislostí proudových zesilovacích činitelů α1 a α2 obou náhradních tranzistorů na proudech emitorů. Druhou podmínkou správné činnosti tyristorů je vznik tzv. multiplikačního jevu v oblasti závěrně polarizovaného přechodu PN J2. Vzrůstá-li závěrné napětí, zvyšuje se šířka vyprázdněné oblasti kolem přechodu PN. Dosáhne-li závěrné napětí hodnoty průrazného napětí, jsou volné nosiče urychleny elektrickým polem tak, že při srážkách s krystalovou mříží uvolňují další páry elektron-díra, které mohou generovat další nové páry. Poměr počtu nosičů vystupujících z depletiční vrstvy k počtu nosičů vstupujících je tzv. multiplikační činitel M. Z náhradního schématu na obr. 3.22. je zřejmé, že pro kolektorové proudy tranzistorů platí:

Pro anodový proud čtyřvrstvé struktury lze psát:
K sepnutí tyristoru dojde jen v tom případě, když anoda bude polarizována kladným napětím vzhledem ke katodě (na tyristoru je tzv. blokovací napětí). [1]
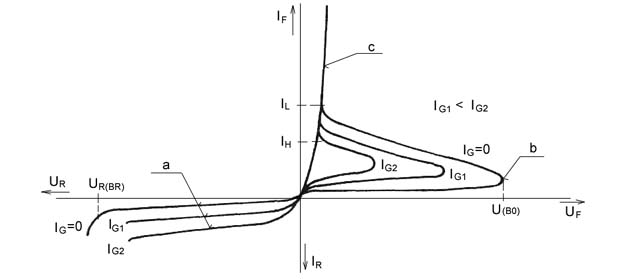
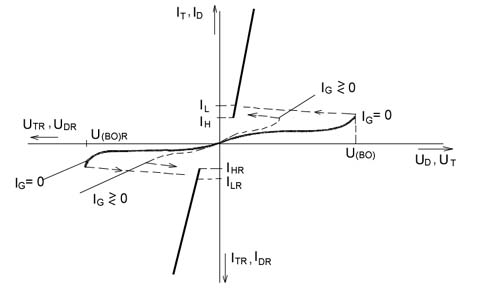
VA charakteristiky tyristoru Výstupní VA charakteristiku tyristoru tvoří závěrná charakteristika (obr. 3.23a) blokovací charakteristika (obr. 3.23b) a propustná charakteristika (obr. 3.23c).
2.23. Výstupní charakteristika tyristoru
Nejdůležitějšími parametry charakterizujícími závěrné vlastnosti tyristoru jsou : a) opakovatelné špičkové závěrné napětí URRM, definované jako nejvyšší přípustná hodnota periodického napětí, kterým je možno zatížit tyristor v závěrném směru b) opakovatelný špičkový závěrný proud IRRM, který je definován jako nejvyšší přípustná hodnota závěrného proudu (při IG = 0), který může tyristorem protékat, je-li namáhán v závěrném směru napětím URRM při nejvyšší provozní teplotě. Průběh blokovací charakteristiky pro nulový řídicí proud IG = 0 je podobný průběhu závěrné charakteristiky. Po překročení průrazného blokovacího napětí U(B0) však tyristor spíná. Zvyšuje-li se velikost proudu IG, zvyšuje se velikost anodového proudu a k sepnutí tyristoru dochází při nižších hodnotách blokovacího napětí. Blokovací schopnosti jsou definovány obdobně jako v závěrném směru opakovatelným špičkovým blokovacím napětím UDRM a opakovatelným špičkovým blokovacím proudem IDRM. Propustná charakteristika pak ukazuje závislost propustného proudu IF na propustném napětí UF měřená na sepnutém tyristoru. Průběh je téměř shodný s průběhem VA charakteristiky přechodu PN, jen velikost úbytku napětí v propustném směru je větší. Bude-li hodnota propustného proudu větší než tzv. přídržný proud IL, tyristor zůstává v sepnutém stavu. Při poklesu proudu pod hodnotu tzv. vratného proudu IH tyristor vypíná a pracovní bod se pohybuje po blokovací charakteristice. Propustné vlastnosti tyristoru charakterizují následující parametry : a) střední propustný proud IT(AV), který je definován jako největší přípustná střední hodnota propustného proudu tyristoru, přičemž je předpokládán jednocestně usměrněný sinusový proud, předepsaný kmitočtový rozsah a splnění předepsaných ochlazovacích podmínek b) neopakovatelný špičkový propustný proud ITSM c) špičkové propustné napětí UTM, které je definováno jako nejvyšší přípustné propustné napětí na tyristoru protéká—li jím proud, jehož střední hodnota je IT(AV) Vstupní VA charakteristika tyristoru vyjadřuje závislost mezi napětím UG a proudem řídicí elektrody IG. Její typický průběh ukazuje obr. 3.24.
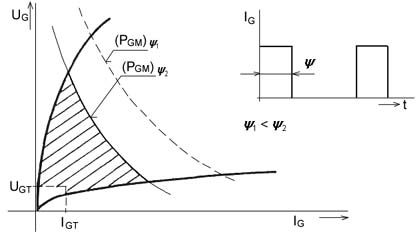
Obr: 3.24. Vstupní charakteristika tyristoru
Poněvadž rozptyl vstupních charakteristik součástek stejného typu je značný, udávají se vždy dvě mezní charakteristiky, vymezující oblast, ve které se muže vstupní charakteristika uvažovaného tyristoru pohybovat. Vstupní charakteristika je potřebná při návrhu koncového stupně v řídicím obvodu. Návrh se provádí tak, že zatěžovací přímka koncového stupně prochází šrafovanou oblasti. Zároveň nesmí být překračovány mezní parametry řídicí elektrody. V závěrném směru vykazuje řídicí obvod špatné závěrné vlastnosti. Proto se obvykle zapojuje paralelně nebo sériově k řídicí elektrodě ochranná dioda. Vlastnosti vstupního řídicího obvodu jsou dále charakterizovány zejména těmito parametry : a) zapínací napětí UGT je definováno jako nejmenší napěti, při kterém sepne libovolný tyristor daného typu v celém rozsahu pracovních teplot b) zapínací proud IGT, který určuje nejmenší řídicí proud, při kterém sepne libovolný tyristor daného typu v celém rozsahu pracovních teplot c) střední ztrátový výkon PG(AV) představující střední hodnotu ztrátového výknu, kterým lze trvale zatěžovat obvod řídicí elektrody d) mezní ztrátový výkon PGM, jenž udává hodnotu, která nesmí být ani krátkodobě překročena [1]
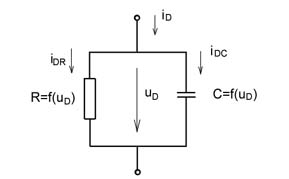
Zapínání tyristoru Přechod tyristoru z vypnutého stavu do sepnutého stavu je možný několika způsoby : a) přivedením kladného řídicího proudu do řídicí elektrody b) překročením průrazného blokovacího napětí c) překročením strmosti nárůstu blokovacího napětí dUD/dt, přičemž hodnota anodového napětí je kladná (tyristor v blokovacím stavu) Způsobu b) se v praxi nepoužívá, neboť velmi často dochází ke zhoršení blokovacích vlastností tyristoru, případně i ke zničení. Narůstá-li blokovací napěti po vypnutí tyristoru s velkou strmostí, může dojít k sepnutí tyristoru bez řídicího signálu i když anodové napětí nepřekročilo hodnotu průrazného blokovacího napětí. Je to způsobeno kapacitou závěrně pólovaného středního přechodu J2, jehož náhradní schéma je znázorněno na obr. 3.25. Celková hodnota proudu tekoucí středním přechodem J2 je dána vztahem:
3.25. Náhradní schéma středního přechodu tyristoru při působení blokovacího napětí
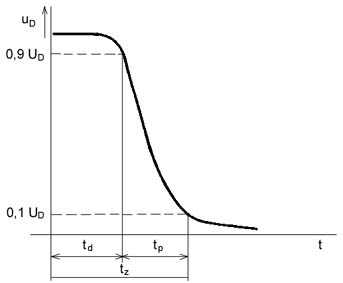
Při zapínacím procesu protéká anodový proud nejdříve pouze úzkým kanálem nacházejícím se v blízkosti řídicí elektrody. Od tohoto místa se vedení proudu postupně šiří do celého průřezu tyristoru. Časový průběh anodového napětí tyristoru při zapínání je znázorněn na obr. 3.26.
Obr: 3.26. Časový průběh anodového napětí při zapínání tyristoru
Na časovém průběhu jsou charakteristické následující úseky : a) doba zpoždění td - časový interval mezi začátkem zapínacího impulsu a okamžikem poklesu napětí na tyristoru na 90 % původní hodnoty b) doba poklesu tp - časový interval, za který poklesne napětí na tyristoru z 90% na 10% původní hodnoty Součtem obou časů je definována zapínací doba tz tyristoru, kterou lze ovlivnit především velikostí proudu řídicí elektrody. Po přivedení zapínacího impulsu nesepne celá struktura tyristoru současně. V případě,že by od prvního okamžiku protékal tyristorem konstantní proud, byl by průřez, kterým tento proud protéká, zpočátku malý a došlo by k místnímu přehřátí PN přechodu, a tím k poškození tyristoru. Proto se udává dovolená strmost nárůstu propustného proudu, která nesmí být překročena. Do obvodu, ve kterém by mohlo dojít k překročení tohoto parametru je nutno do série s tyristorem zařadit cívku, jejíž indukčnost omezí strmost nárůstu proudu. [1]
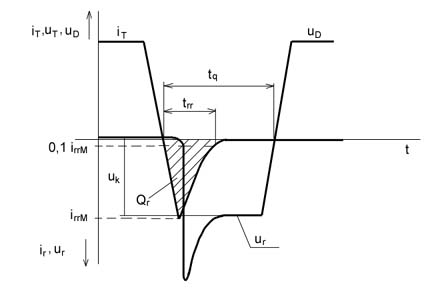
Vypínání tyristoru Vypínání tyristoru spočívá v odčerpání volných nosičů náboje z polovodičové struktury tyristoru. Prakticky se toho dosahuje snížením anodového proudu pod hodnotu vratného proudu IH, což je možné těmito způsoby: a) přerušením anodového proudu b) zkratováním anody a katody tyristoru c) závěrnou polarizací tyristoru Vypnutí tyristoru probíhá v první fázi stejně jako u diody. Stejným způsobem jsou definovány závěrná zotavovací doba trr a komutační náboj Qr. Po zotavení závěrného odporu přechodů J1 a J3 ještě vypínací proces nekončí. Další doby je zapotřebí k obnovení blokovací schopnosti. V souvislosti s tím je definována tzv. vypínací doba tq, která je dána časovým intervalem od průchodu propustného proudu nulou do okamžiku, kdy je možno na tyristor přiložit blokovací napětí, aniž by znovu sepnul bez působení řídicí elektrody. Vypínací doba závisí na vypínacích podmínkách, a to na teplotě přechodů, vypínaném proudu a na velikosti závěrného napětí.
Obr: 3.27. Časové průběhy proudu a napětí při vypínání tyristoru [1]
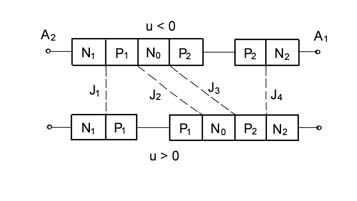
Triak (přesnější název obousměrný triodový tyristor) je pětivrstvá součástka PNPNF, resp. NPNPN se třemi vývody. Princip činnosti přetivrstvé struktury si lze vysvětlit, představíme-li si ji jako antiparalelní zapojení dvou čtyrvrstvových struktur (obr 3.28.).
Obr: 3.28. Pětivrstvá struktura
Obr: 3.29. Struktura triaku
Při připojeni napětí libovolné polarity se struktura rozdělí na dva prvky závěrně polovanou diodu a propustně polovaný diodový tyristor. Vyvedením řídicí elektrody vznikne řiditelný prvek. VA charakteristika triaku je znázorněna na ohr. 3.30.
Obr: 3.30. VA charakteristika triaku
Přivedením řídícího signálu mezi svorky G a A1 dojde k sepnutí triaku, přičemž řídicí proud může být jak kladný, tak i záporný a to při obou polaritách napětí mezi svorkami A1, A2. Vzájemná kombinace řídícího a anodového napětí dává čtyři různé možnosti zapínání. Triaky se proti tyristorům poněkud odlišují v dynamických parametrech. Stejně jako u tyristorů je i u triaků zapínací proces charakterizován zapínací dobou a strmostí nárůstu propustného proudu. U triaků není udávána vypínací doba jako u tyristorů. Vypínací proces se totiž podstatně liší od stejného procesu u tyristorů. Rozdíly vyplývají z toho, že triakem může procházet proud obou polarit. Při každé polaritě prochází proud jinou částí pětivrstvé struktury. Při průchodu proudu kterékoliv polarity dochází k tomu, že volné nosiče z vodivé části pronikají difúzí do oblasti nevodivé. Zde pak po určitou dobu setrvávají i po tom,kdy propustný proud klesl na minimum. Je-li pokles proudu dostatečně strmý a přiložíme—li k triaku napětí opačné polarity, jsou tyto nosiče urychleny elektrickým polem a mohou triak zapnout. Ten pak vede proud v opačném směru a nedojde k vypnutí. O tom, zda dojde k znovuzapnutí triaku, bude rozhodovat velikost procházejícího proudu bezprostředně před komutací a strmost nárůstu napětí du/dt. Triaky jsou vhodné zejména pro řízení a spínání střídavého proudu, a to zejména v aplikacích s činnou zátěží nebo tam, kde zátěž nemá velkou induktivní složku. [1]
|